
Audrey Woods, MIT CSAIL Alliances | DATE
What if a robot could work right out of the box with no lengthy calibration or extra training, just a description of how it's built and a plain-language instruction?
MIT CSAIL PhD student Nishanth Kumar is making that a reality with TiPToP, a plug-and-play robotics system that challenges the current paradigms of robot training and deployment.
A TRAINING-FREE PATH TO ROBOT DEPLOYMENT
Kumar's research centers around sequential decision-making for embodied AI. "A robot is almost never useful if it can only make one decision. It needs to make many, many decisions to actually do something useful." Though his primary focus is robotics, with a particular focus on household robotics, Kumar notes that his work applies to other emerging fields like web agents and computer-use assistants, where an AI must string together many actions to accomplish a goal.
Along with colleagues in the Learning and Intelligent Systems (LIS) Group and his advisors, Professors Leslie Kaelbling and Tomás Lozano-Pérez, Kumar helped develop TiPToP: a modular open-vocabulary planning system for robot manipulation. Unlike other robot training methods, TiPToP is designed to be radically accessible. A user downloads the open-source system, uploads a URDF (Universal Robot Description Format) file describing their robot's configuration, provides a stereo camera image, and issues a natural language command to control and direct the robot. The system can pick, place, and move objects, wipe surfaces, and handle several other fundamental manipulation tasks, all autonomously. What sets it apart is the total absence of training requirements. "In a lot of the existing systems, you have to collect training data on your robot. But our system is completely training-free."
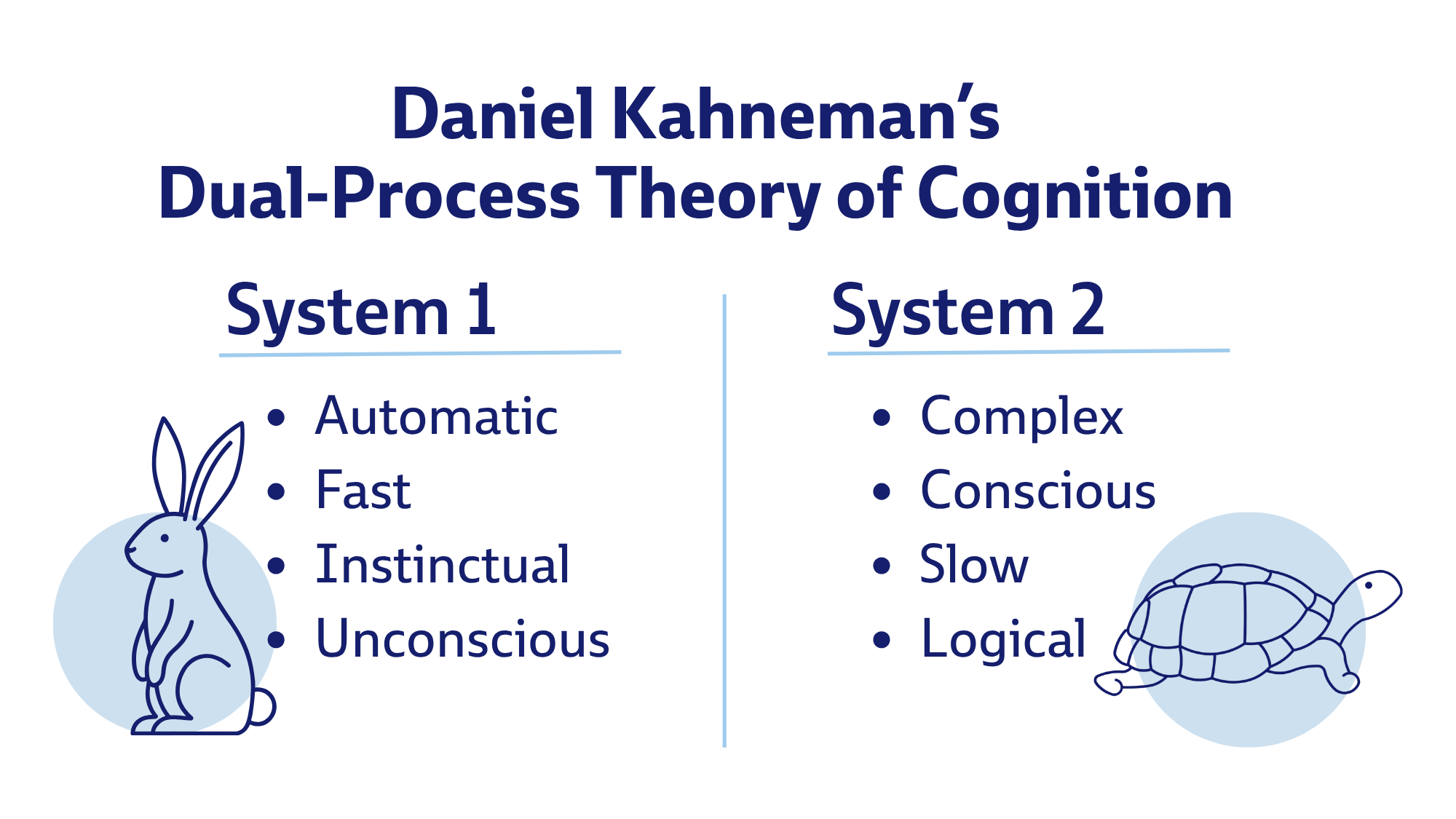
One core concept behind TiPToP is is the dual-process theory of cognition by Daniel Kahneman (author of Thinking Fast and Slow). This theory states that fast, intuitive thinking (System 1) is a different "type" of thinking than slow, deliberative reasoning (System 2). Most current robotic systems are inspired by System 1, relying on heavy training to build intuitive responses. TiPToP aims for the other bucket, offering a System 2 approach. To Kumar, TiPToP is meant to be one part in an assembly of systems making autonomous, useful machines. "In some sense, we're designing a brain. System 1 is like your motor cortex, and System 2 is your prefrontal cortex."
HARDWARE AGNOSTIC AND INDEPENDENTLY VERIFIED
To ensure objectivity, Kumar and his collaborators sent TiPToP to a research group at the University of Pennsylvania with no involvement in its development. The UPenn team compared TiPToP to Physical Intelligence's π0.5-DROID model, fine-tuned on 350 hours of demonstrations. While Physical Intelligence's system excelled at reactive tasks requiring fast, intuitive grasping, TiPToP dominated on long-horizon tasks requiring planning, like packing a box where early decisions constrain later options. "In areas where, as a human, you would deliberate because what you're doing in the current moment has implications for the future, that is where our system shines."
Perhaps most excitingly, TiPToP matched or beat System 1 approaches on speed despite running complex reasoning algorithms hundreds or thousands of times. The key is massive parallelization across modern GPUs and CPUs. "There's a common belief in the field that these System 2 methods are way slower. But modern hardware is really good. We can actually speed up this stuff way more than people expect."
FUTURE WORK & MESSAGE TO INDUSTRY
With TiPToP addressing System 2 behavior and companies like Physical Intelligence tackling System 1, Kumar says that the next step is knitting these two "sides" of physical AI together for a fully embodied system. "After releasing this system, our hope is that the entire field will get a better understanding of where System 2 shines and where System 1 shines." However, integration is no simple feat. "It's an open research question. There are at least 20 ways to integrate these systems, and which one is the right one? We don't know yet."
In the present moment, TiPToP offers practical implications to businesses seeking robotic solutions. "Some people might believe they need to set up a foundation model team to collect a bunch of robot data. Depending on their application, they might not need to do any of that." Kumar advises staying agile and open-minded, cautioning against premature commitment to any paradigm in a field that is still wide open.
As for the question on everyone's mind—will there be a ChatGPT moment for robots?—Kumar is optimistic. "A few months ago, I would have told you that's three to five years down the pipeline. It might be sooner. I could see it happening in 18 months."
Kumar concludes, "it's a very, very exciting time to be in the field. We could use a lot more people, and there's a lot of opportunity."
Learn more about Nishanth Kumar on his website or CSAIL page.


