One paradox about antibiotics is that, broadly speaking, the more we use them, the less they continue to work. The Darwinian process of bacteria growing resistant to antibiotics means that, when the drugs don't work, we can no longer treat infections, leading to groups like the World Health Organization warning about our ability to control major public health threats.
In an update to a five-year project from CSAIL and the Senseable City Lab, researchers have been developing the world's first fleet of autonomous boats for the City of Amsterdam, the Netherlands, and have recently added a new, larger vessel to the group: “Roboat II.”
Researchers at CSAIL recently made a major development in the area of lost languages: a new system that has been shown to be able to automatically decipher a lost language, without needing advanced knowledge of its relation to other languages.
A group led by researchers at MIT’s Computer Science and Artificial Intelligence Lab (CSAIL) has developed a machine learning model that can look at an X-ray to quantify how severe the edema is, on a four-level scale ranging from 0 (healthy) to 3 (very, very bad). The system determined the right level more than half of the time, and correctly diagnosed level 3 cases 90 percent of the time.
MIT researchers have developed a wireless, private way to monitor a person’s sleep postures — whether snoozing on their back, stomach, or sides — using reflected radio signals from a small device mounted on a bedroom wall.
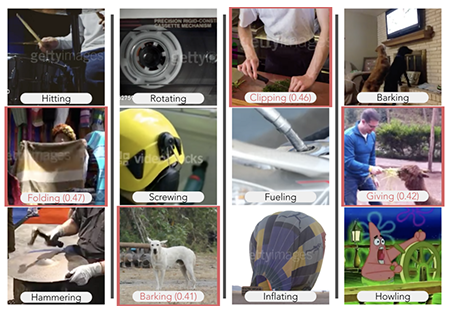
In a new study at the European Conference on Computer Vision last month, researchers unveiled a hybrid language-vision model that can compare and contrast a set of dynamic events captured on video to tease out the high-level concepts connecting them.
One of the biggest challenges in computing is handling the onslaught of information while still being able to efficiently store and process it. A team from MIT CSAIL believe that the answer rests with something called “instance-optimized systems.”
OpenAI unveiled the largest language model in the world, a text-generating tool called GPT-3 that can write creative fiction, translate legalese into plain English, and answer obscure trivia questions. It’s the latest feat of intelligence achieved by deep learning, a machine learning method patterned after the way neurons in the brain process and store information.
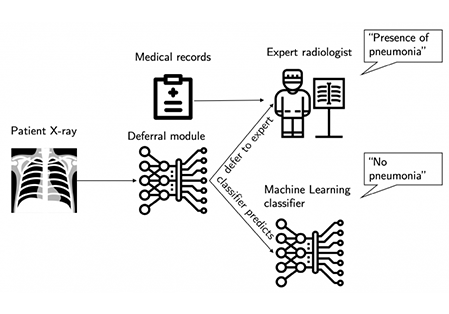
Researchers from CSAIL have developed a machine learning system that can either make a prediction about a task, or defer the decision to an expert. Most importantly, it can adapt when and how often it defers to its human collaborator, based on factors such as its teammate’s availability and level of experience.
With the boundless treasure trove of paintings that exist, the connections between these works of art from different periods of time and space can often go overlooked. It’s impossible for even the most knowledgeable of art critics to take in millions of paintings across thousands of years and be able to find unexpected parallels in themes, motifs, and visual styles.