A new chip developed by MIT researchers could help tiny, low-power UAVs avoid obstacles as they zip around tight corners inside an industrial HVAC system to check for gas leaks.
In his 1927 paper, “A law of comparative judgment,” the American psychologist L. L. Thurstone proposed that when people select one option among multiple alternatives, they are picking the one that has the highest value to them, even though they cannot assign a particular number to that choice.
The CSAIL Alliances Annual Meeting is our signature three-day event exclusive to CSAIL Alliances members.* This is your opportunity to engage with thought leaders crafting the next wave of AI and computer science and build the relationships that will drive your organization forward.
Imagine having a continuum soft robotic arm bend around a bunch of grapes or broccoli, adjusting its grip in real time as it lifts the object. Unlike traditional rigid robots that generally aim to avoid contact with the environment as much as possible and stay far away from humans for safety reasons, this arm senses subtle forces, stretching and flexing in ways that mimic more of the compliance of a human hand. Its every motion is calculated to avoid excessive force while achieving the task efficiently. In MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) and Laboratory for Information and Decisions Systems (LIDS) labs, these seemingly simple movements are the culmination of complex mathematics, careful engineering, and a vision for robots that can safely interact with humans and delicate objects.
Pulkit Agrawal, MIT EECS Associate Professor and CSAIL principal investigator, has received the Toshio Fukuda Young Professional Award from the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) for his work in “robot learning, self-supervised and sim-to-real policy learning, agile locomotion, and dexterous manipulation,” according to the organization.
The Quant-essential Qualities: Insider Insights for Thriving in Algorithmic Trading
Abstract: The world of quantitative trading is notoriously siloed, secretive, and intensely competitive. In this talk, Hanna and Dan will offer an insider's perspective on quant trading, sharing insights from our firm, and outline the key qualities you can cultivate to excel in the industry.
When the IEEE International Conference on Robotics and Automation (ICRA) first convened 40 years ago, the robotics community shared a clear vision: robots would one day combine elegant mathematical models with advanced computation to handle complex tasks. Four decades later, the community is divided over how to reach that goal. That divide was on full display this May in Atlanta, where ICRA marked its anniversary with a unique closing keynote: a live Oxford-style debate on whether “data will solve robotics and automation.”
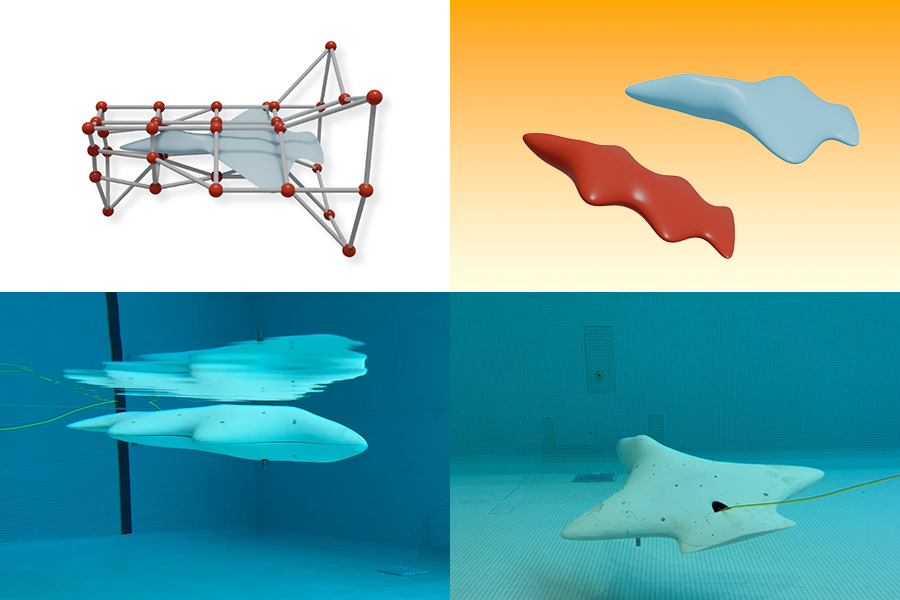
Marine scientists have long marveled at how animals like fish and seals swim so efficiently despite having different shapes. Their bodies are optimized for efficient aquatic navigation (or hydrodynamic) so they can exert minimal energy when traveling long distances.
In an office at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), a soft robotic hand carefully curls its fingers to grasp a small object. The intriguing part isn’t the mechanical design or embedded sensors – in fact, the hand contains none. Instead, the entire system relies on a single camera that watches the robot’s movements and uses that visual data to control it.
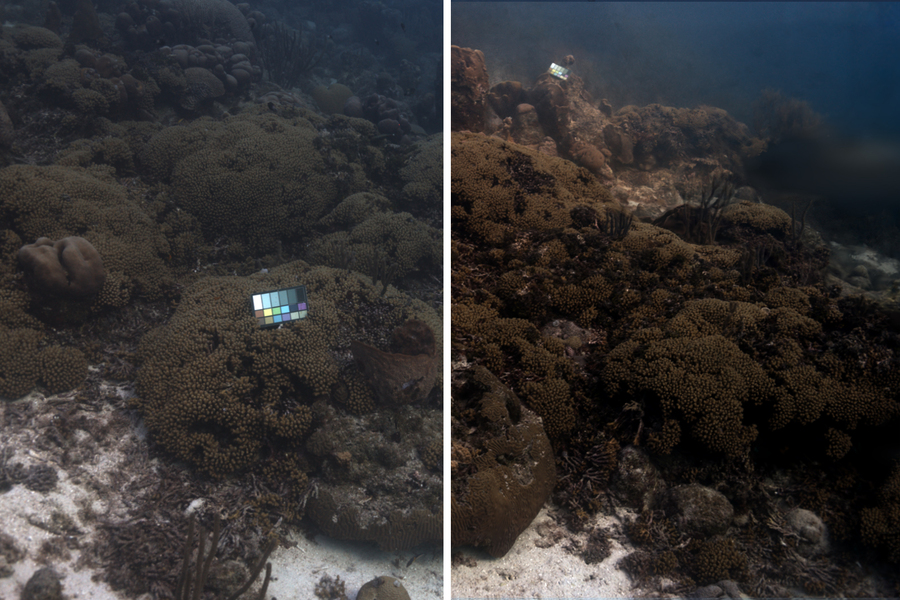
The ocean is teeming with life. But unless you get up close, much of the marine world can easily remain unseen. That’s because water itself can act as an effective cloak: Light that shines through the ocean can bend, scatter, and quickly fade as it travels through the dense medium of water and reflects off the persistent haze of ocean particles. This makes it extremely challenging to capture the true color of objects in the ocean without imaging them at close range.