We present Dense Object Nets, which build on recent developments in self-supervised dense descriptor learning, as a consistent object representation for visual understanding and manipulation.
We demonstrate how a sequence model and a sampling-based planner can influence each other to produce efficient plans and how such a model can automatically learn to take advantage of observations of the environment.
MIT researchers describe an autonomous system for a fleet of drones to collaboratively search under dense forest canopies. The drones use only onboard computation and wireless communication — no GPS required.
We present a novel computational framework for high-resolution topology optimization that delivers leaps in simulation capabilities, by two orders of magnitude, from the state-of-the-art approaches.
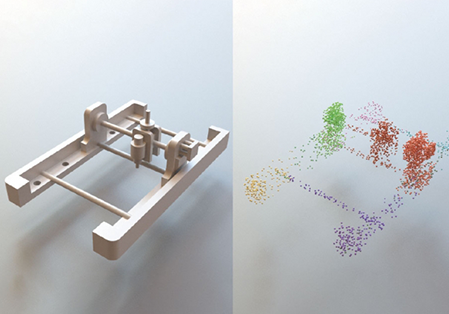
MIT researchers have devised a technique that “reverse engineers” complex 3-D computer-aided design (CAD) models, making them far easier for users to customize for manufacturing and 3-D printing applications.
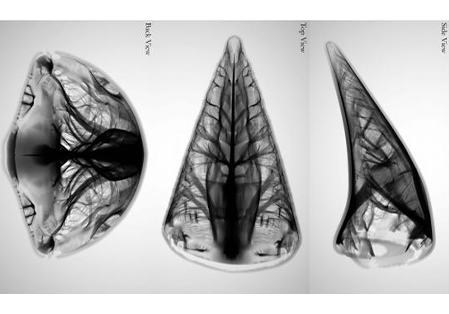
From a single image, humans are able to perceive the full 3D shape of an object by exploiting learned shape priors from everyday life. Contemporary single-image 3D reconstruction algorithms aim to solve this task in a similar fashion, but often end up with priors that are highly biased by training classes.
Amateur and professional musicians alike may spend hours pouring over YouTube clips to figure out exactly how to play certain parts of their favorite songs. But what if there were a way to play a video and isolate the only instrument you wanted to hear?