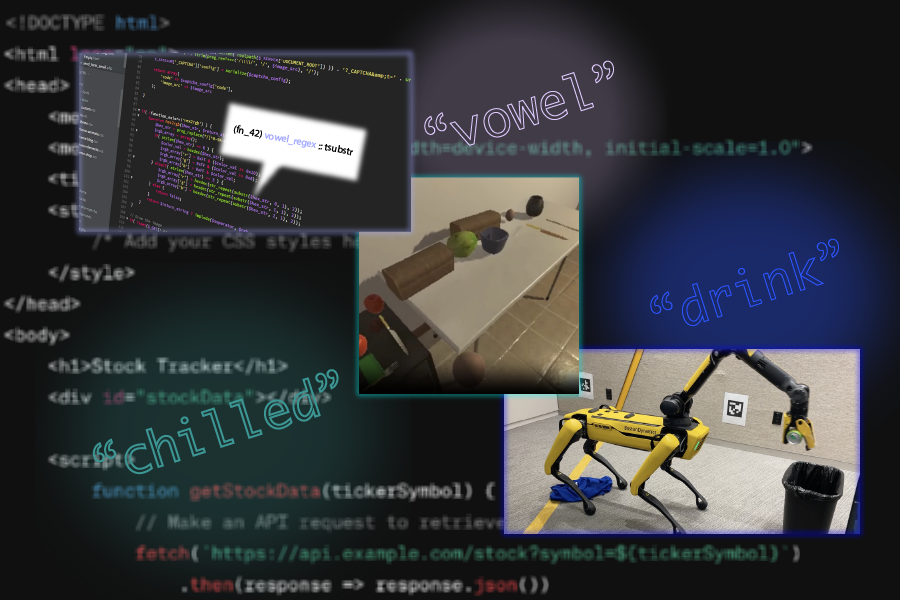
Large language models (LLMs) are becoming increasingly useful for programming and robotics tasks, but for more complicated reasoning problems, the gap between these systems and humans looms large. Without the ability to learn new concepts like humans do, these systems fail to form good abstractions — essentially, high-level representations of complex concepts that skip less-important details — and thus sputter when asked to do more sophisticated tasks.
Daniela Rus is a pioneering roboticist and a professor of electrical engineering and computer science at MIT. She is the director of the Computer Science and Artificial Intelligence Laboratory. She is also a member of the National Academy of Engineering, the American Academy of Arts and Sciences, and a MacArthur Fellow.
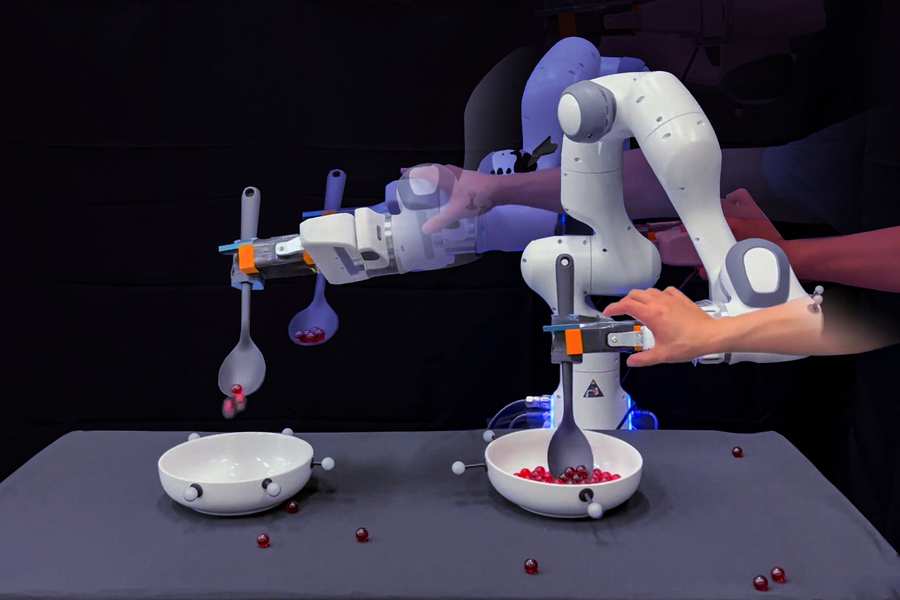
From wiping up spills to serving up food, robots are being taught to carry out increasingly complicated household tasks. Many such home-bot trainees are learning through imitation; they are programmed to copy the motions that a human physically guides them through.
If a robot traveling to a destination has just two possible paths, it needs only to compare the routes’ travel time and probability of success. But if the robot is traversing a complex environment with many possible paths, choosing the best route amid so much uncertainty can quickly become an intractable problem.
Before a robot can grab dishes off a shelf to set the table, it must ensure its gripper and arm won’t crash into anything and potentially shatter the fine china. As part of its motion planning process, a robot typically runs “safety check” algorithms that verify its trajectory is collision-free.
You’ve likely met someone who identifies as a visual or auditory learner, but others absorb knowledge through a different modality: touch. Being able to understand tactile interactions is especially important for tasks such as learning delicate surgeries and playing musical instruments, but unlike video and audio, touch is difficult to record and transfer.
To teach an AI agent a new task, like how to open a kitchen cabinet, researchers often use reinforcement learning — a trial-and-error process where the agent is rewarded for taking actions that get it closer to the goal.
It isn’t easy for a robot to find its way out of a maze. Picture these machines trying to traverse a kid’s playroom to reach the kitchen, with miscellaneous toys scattered across the floor and furniture blocking some potential paths. This messy labyrinth requires the robot to calculate the most optimal journey to its destination, without crashing into any obstacles. What is the bot to do?