The recent ransomware attack on ChangeHealthcare, which severed the network connecting health care providers, pharmacies, and hospitals with health insurance companies, demonstrates just how disruptive supply chain attacks can be. In this case, it hindered the ability of those providing medical services to submit insurance claims and receive payments.
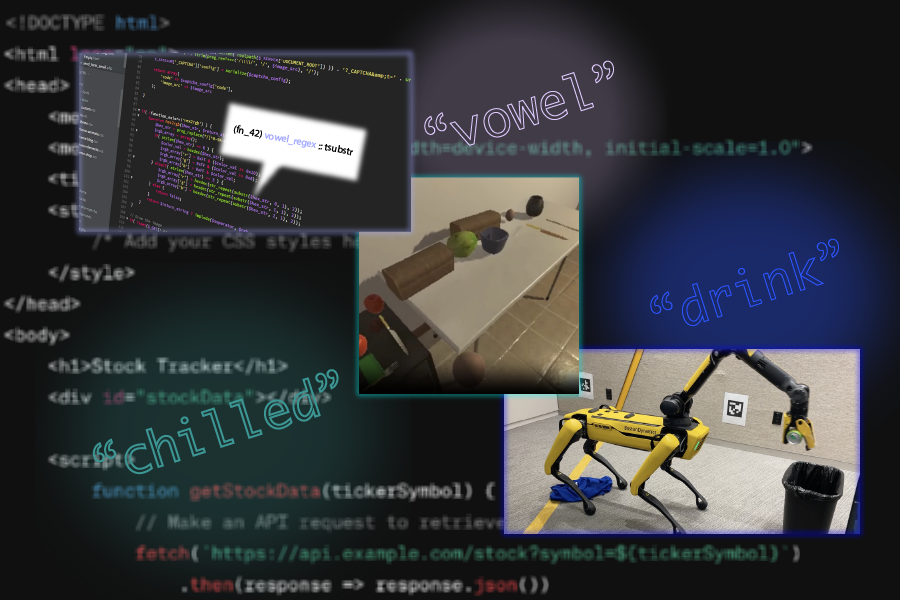
Large language models (LLMs) are becoming increasingly useful for programming and robotics tasks, but for more complicated reasoning problems, the gap between these systems and humans looms large. Without the ability to learn new concepts like humans do, these systems fail to form good abstractions — essentially, high-level representations of complex concepts that skip less-important details — and thus sputter when asked to do more sophisticated tasks.
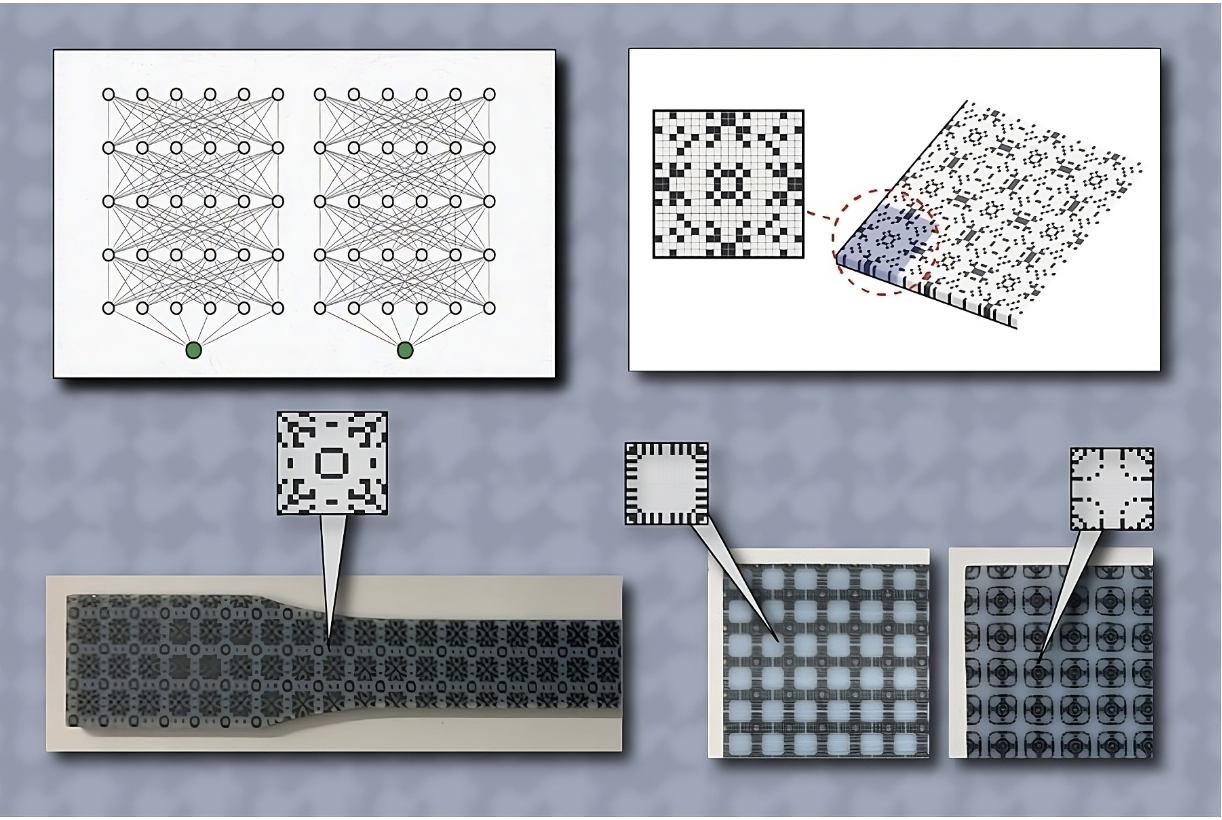
Every time you smoothly drive from point A to point B, you're not just enjoying the convenience of your car, but also the sophisticated engineering that makes it safe and reliable. Beyond its comfort and protective features lies a lesser-known yet crucial aspect: the expertly optimized mechanical performance of microstructured materials. These materials, integral yet often unacknowledged, are what fortify your vehicle, ensuring durability and strength on every journey.
An interdisciplinary team of researchers thinks health AI could benefit from some of the aviation industry’s long history of hard-won lessons that have created one of the safest activities today.