When the IEEE International Conference on Robotics and Automation (ICRA) first convened 40 years ago, the robotics community shared a clear vision: robots would one day combine elegant mathematical models with advanced computation to handle complex tasks. Four decades later, the community is divided over how to reach that goal. That divide was on full display this May in Atlanta, where ICRA marked its anniversary with a unique closing keynote: a live Oxford-style debate on whether “data will solve robotics and automation.”
MIT researchers have developed a reconfigurable antenna that dynamically adjusts its frequency range by changing its physical shape, making it more versatile for communications and sensing than static antennas.
If you rotate an image of a molecular structure, a human can tell the rotated image is still the same molecule, but a machine-learning model might think it is a new data point. In computer science parlance, the molecule is “symmetric,” meaning the fundamental structure of that molecule remains the same if it undergoes certain transformations, like rotation.
When ChatGPT or Gemini gives what seems to be an expert response to your burning questions, you may not realize how much information it relies on to give that reply. Like other popular artificial intelligence (AI) models, these chatbots rely on backbone systems called foundation models that train on billions or even trillions of data points.
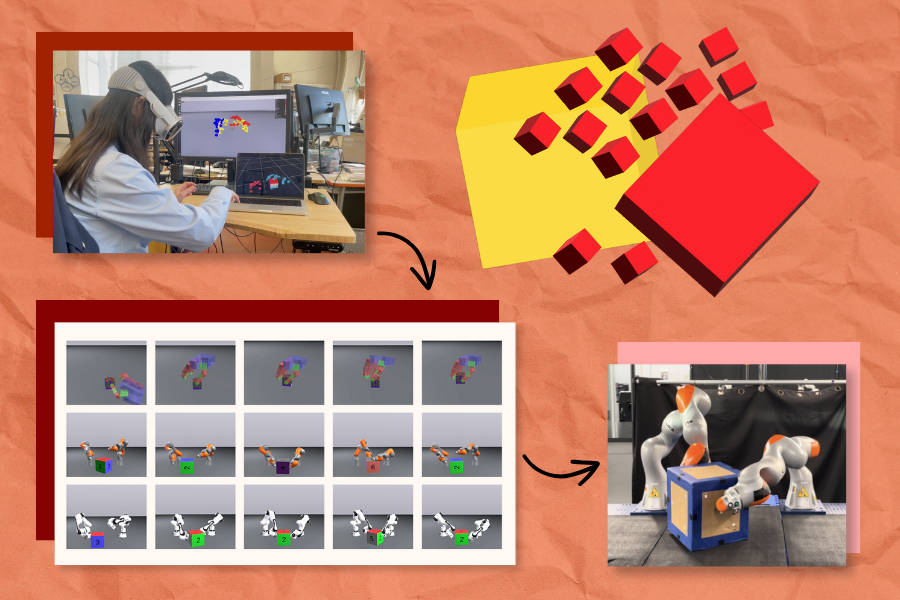
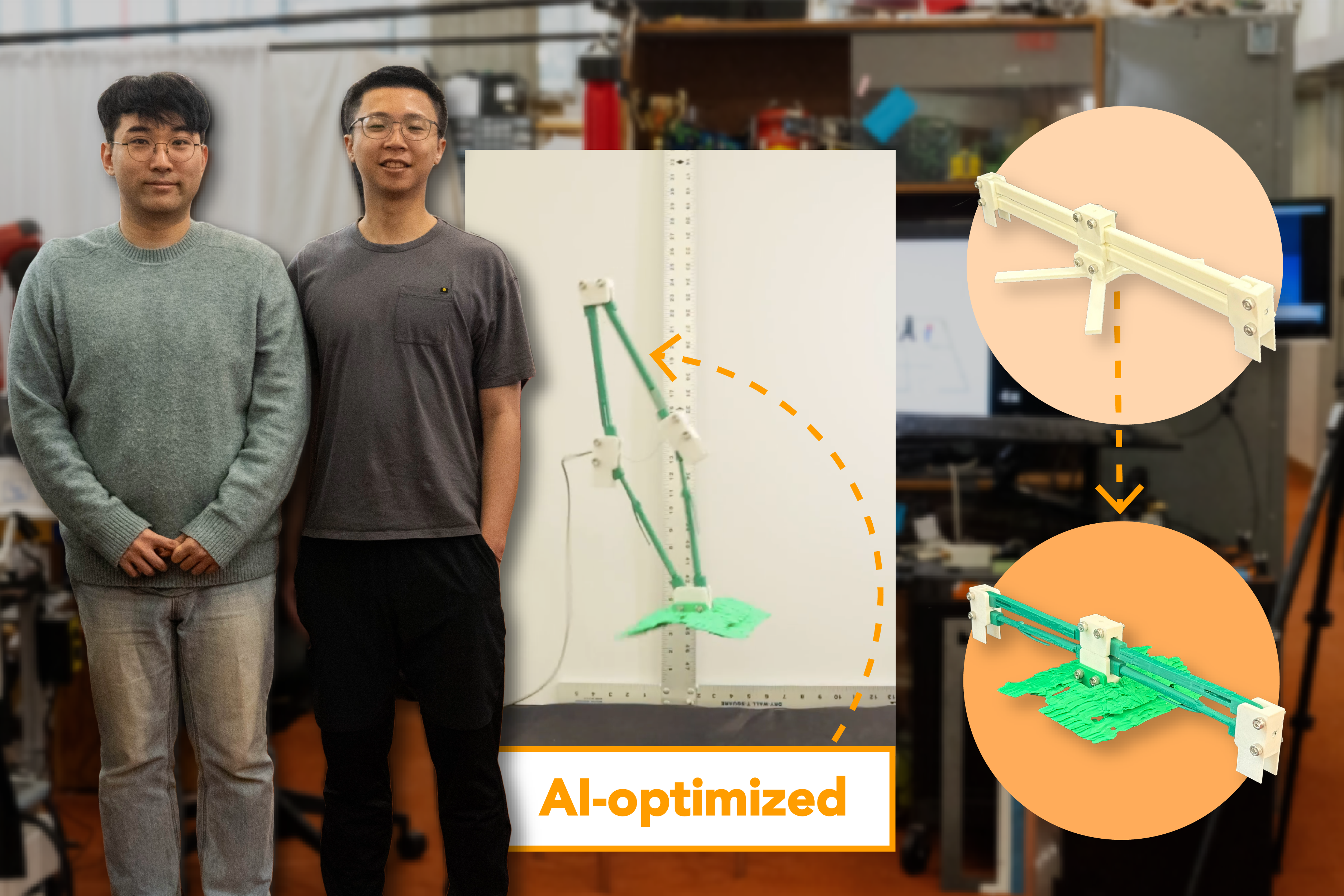
Diffusion models like OpenAI’s DALL-E are becoming increasingly useful in helping brainstorm new designs. Humans can prompt these systems to generate an image, create a video, or refine a blueprint, and come back with ideas they hadn’t considered before.
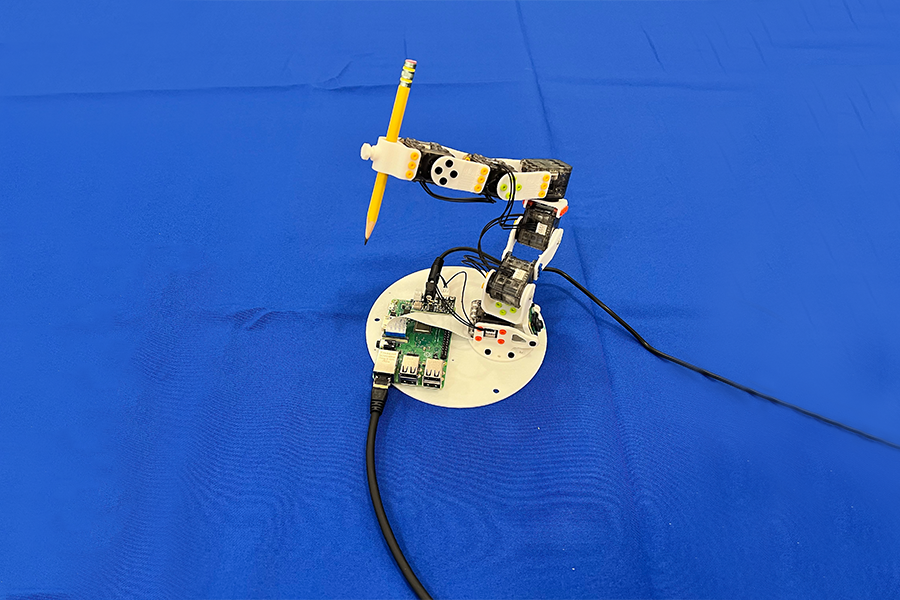
In an office at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), a soft robotic hand carefully curls its fingers to grasp a small object. The intriguing part isn’t the mechanical design or embedded sensors – in fact, the hand contains none. Instead, the entire system relies on a single camera that watches the robot’s movements and uses that visual data to control it.
Ready for that long-awaited summer vacation? First, you’ll need to pack all items required for your trip into a suitcase, making sure everything fits securely without crushing anything fragile.
The Hertz Foundation announced that it has awarded fellowships to eight MIT affiliates. The prestigious award provides each recipient with five years of doctoral-level research funding (up to a total of $250,000), which gives them an unusual measure of independence in their graduate work to pursue groundbreaking research.
Diffusion models like OpenAI’s DALL-E are becoming increasingly useful in helping brainstorm new designs. Humans can prompt these systems to generate an image, create a video, or refine a blueprint, and come back with ideas they hadn’t considered before.
A human clearing junk out of an attic can often guess the contents of a box simply by picking it up and giving it a shake, without the need to see what’s inside. Researchers from MIT, Amazon Robotics, and the University of British Columbia have taught robots to do something similar.