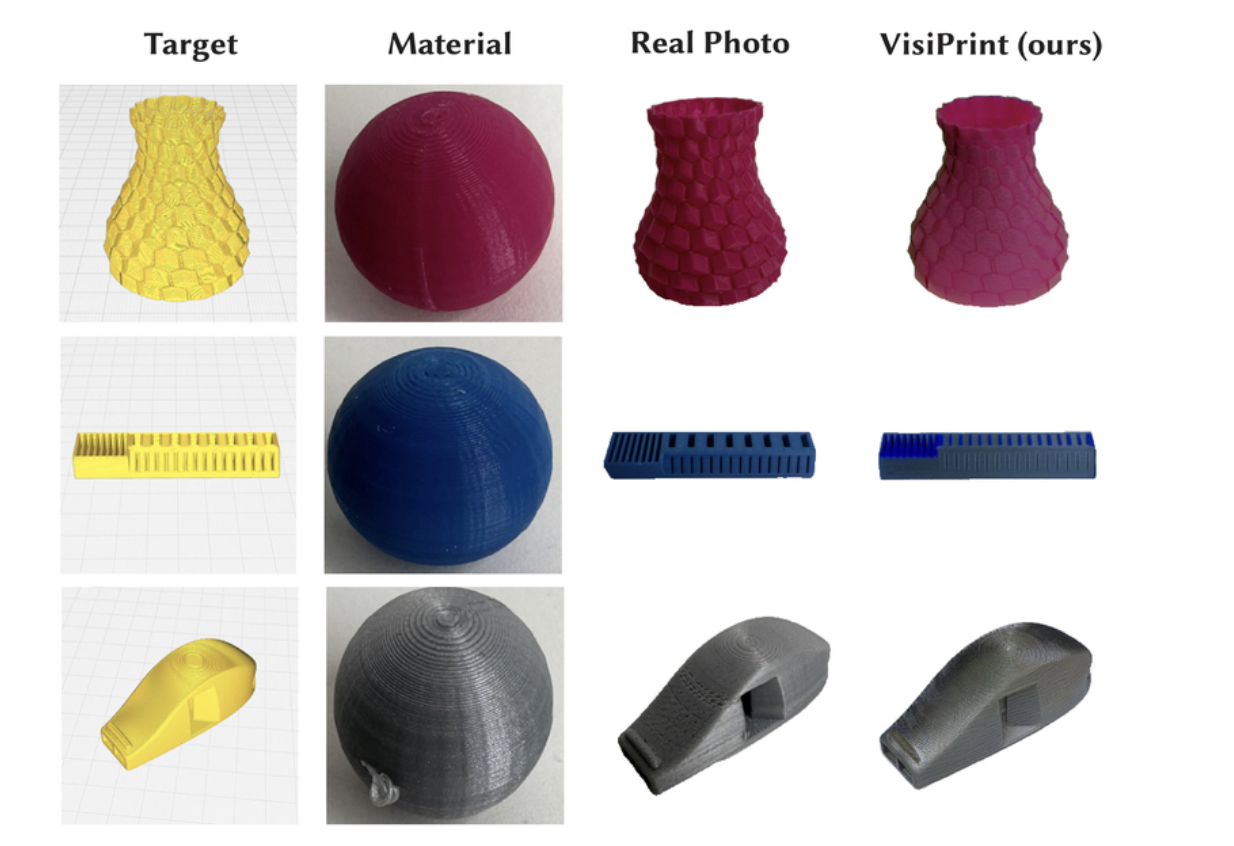
Designers, makers, and others often use 3D printing to rapidly prototype a range of functional objects, from movie props to medical devices. Accurate print previews are essential so users know a fabricated object will perform as expected.
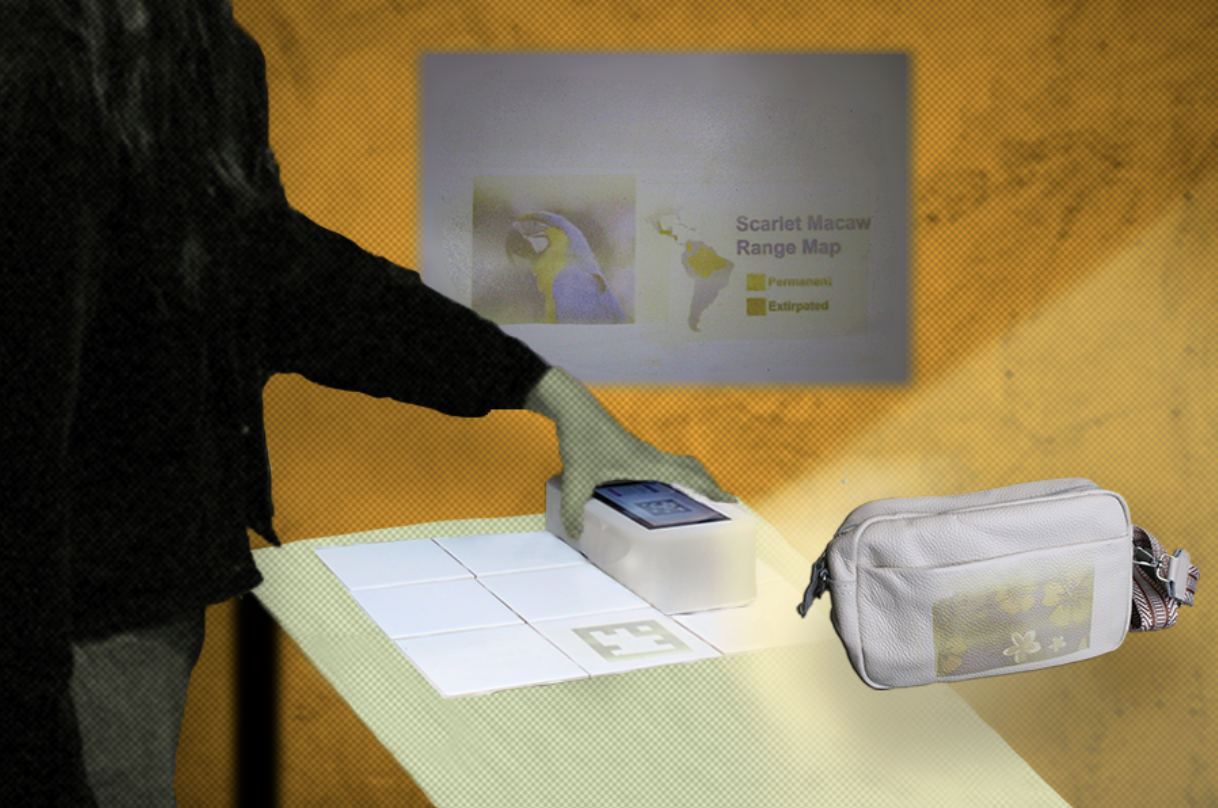
Imagine a world where you could change the designs you see on bags, shirts, and walls whenever you want. Typical clothes would become customizable fashion pieces, while your humble abode could turn into a smart home. That’s the vision of scientists like MIT PhD student Yunyi Zhu ’20, MEng ’21: technology that can “reprogram” the appearance of personal accessories, home decor, and office items.
The CSAIL Alliances Annual Meeting is our signature three-day event exclusive to CSAIL Alliances members.* This is your opportunity to engage with thought leaders crafting the next wave of AI and computer science and build the relationships that will drive your organization forward.
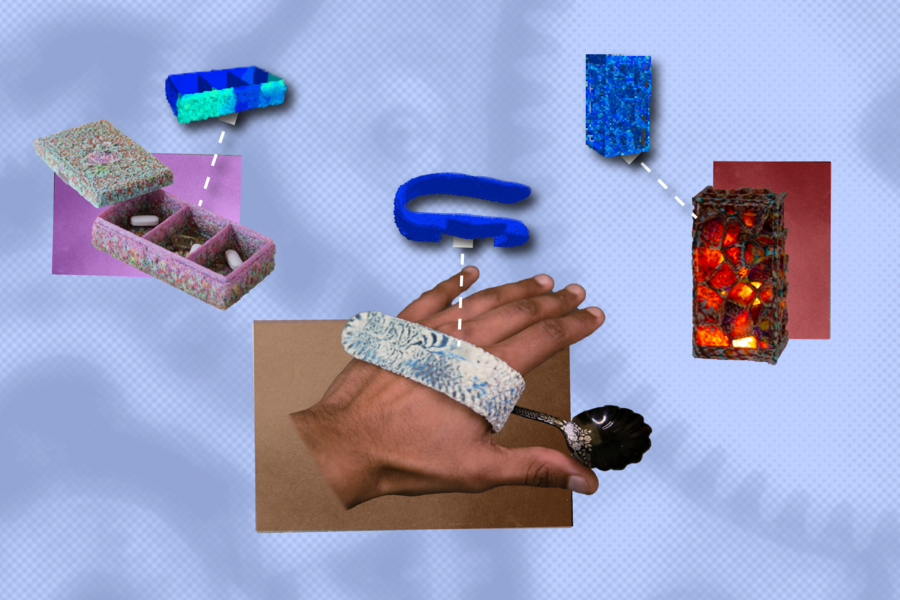
Ever had an idea for something that looked cool, but wouldn’t work well in practice? When it comes to designing things like decor and personal accessories, generative artificial intelligence (genAI) models can relate. They can produce creative and elaborate 3D designs, but when you try to fabricate such blueprints into real-world objects, they usually don’t sustain everyday use.
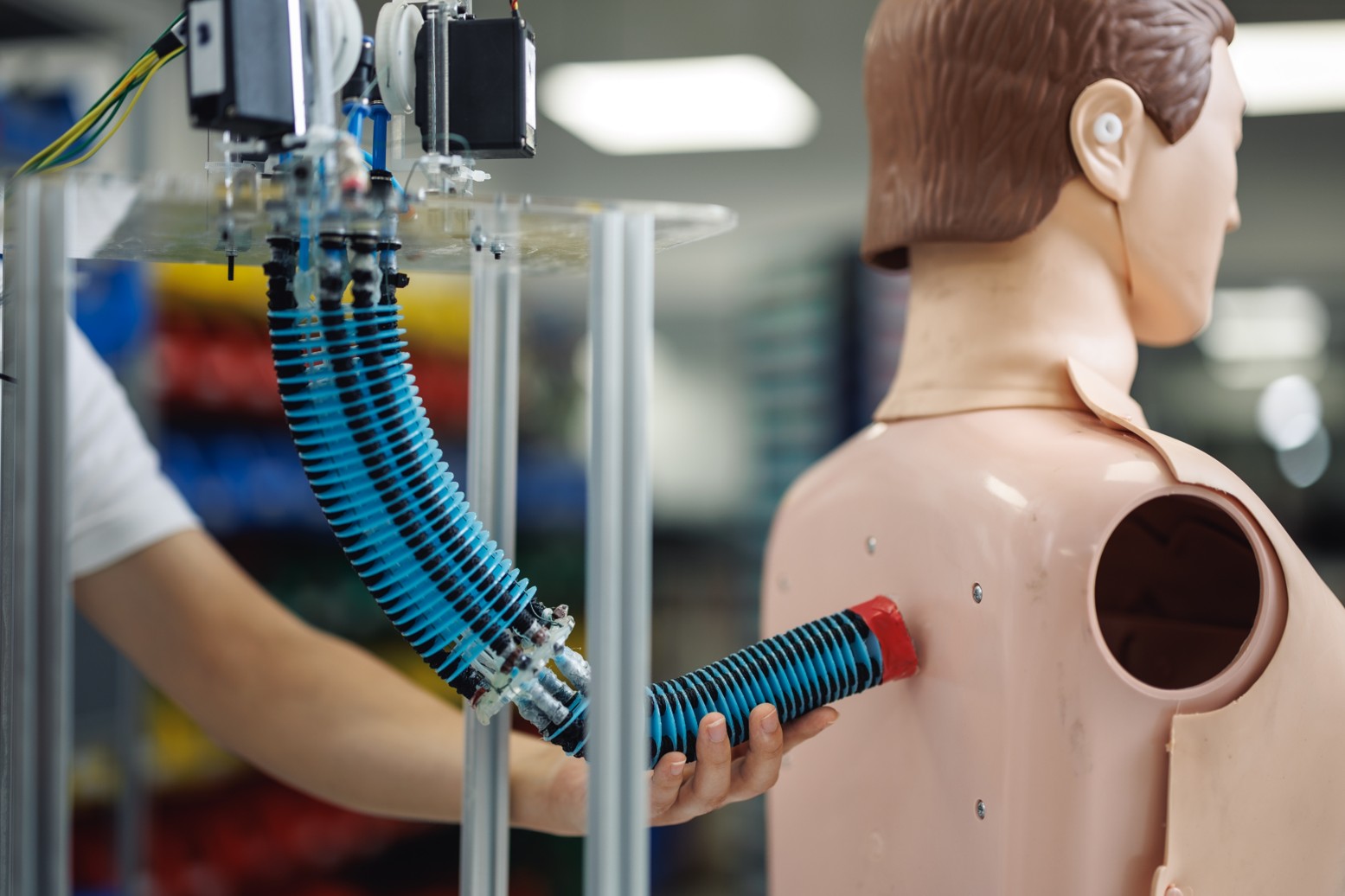
Singapore-MIT Alliance for Research and Technology’s (SMART) Mens, Manus & Machina (M3S) interdisciplinary research group, and National University of Singapore (NUS), alongside collaborators from Massachusetts Institute of Technology (MIT) and Nanyang Technological University (NTU Singapore), have developed an AI control system that enables soft robotic arms to learn a wide repertoire of motions and tasks once, then adjust to new scenarios on the fly without needing retraining or sacrificing functionality. This breakthrough brings soft robotics closer to human-like adaptability for real-world applications, such as in assistive robotics, rehabilitation robots, and wearable or medical soft robots, by making them more intelligent, versatile and safe.
Generative artificial intelligence models have left such an indelible impact on digital content creation that it’s getting harder to recall what the internet was like before it. You can call on these AI tools for clever projects such as videos and photos — but their flair for the creative hasn’t quite crossed over into the physical world just yet.
MIT researchers have developed a new method for designing 3D structures that can be transformed from a flat configuration into their curved, fully formed shape with only a single pull of a string.
Computer-aided design (CAD) systems are tried-and-true tools used to design many of the physical objects we use each day. But CAD software requires extensive expertise to master, and many tools incorporate such a high level of detail they don’t lend themselves to brainstorming or rapid prototyping.
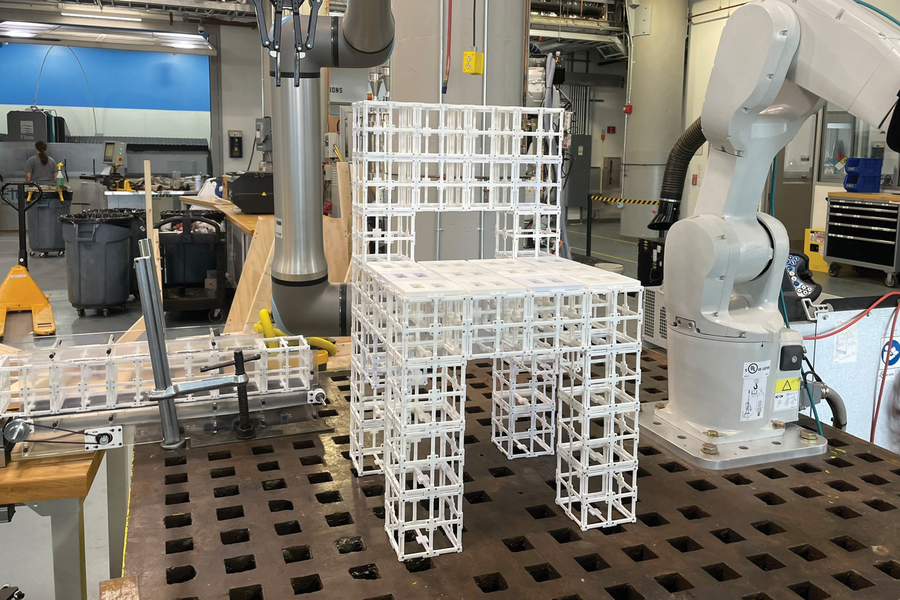
Imagine having a continuum soft robotic arm bend around a bunch of grapes or broccoli, adjusting its grip in real time as it lifts the object. Unlike traditional rigid robots that generally aim to avoid contact with the environment as much as possible and stay far away from humans for safety reasons, this arm senses subtle forces, stretching and flexing in ways that mimic more of the compliance of a human hand. Its every motion is calculated to avoid excessive force while achieving the task efficiently. In MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) and Laboratory for Information and Decisions Systems (LIDS) labs, these seemingly simple movements are the culmination of complex mathematics, careful engineering, and a vision for robots that can safely interact with humans and delicate objects.