In the field of self-driving cars, algorithms for controlling lane changes are an important topic of study. But most existing lane-change algorithms have one of two drawbacks: Either they rely on detailed statistical models of the driving environment, which are difficult to assemble and too complex to analyze on the fly; or they’re so simple that they can lead to impractically conservative decisions, such as never changing lanes at all.
With machine learning systems now being used to determine everything from stock prices to medical diagnoses, it’s never been more important to look at how they arrive at decisions.
A new approach out of MIT demonstrates that the main culprit is not just the algorithms themselves, but how the data itself is collected.
Researchers compiled and analyzed the first-ever comprehensive dataset of RfC conversations, captured over an eight-year period, and conducted interviews with editors who frequently close RfCs, to understand why they don’t find a resolution.
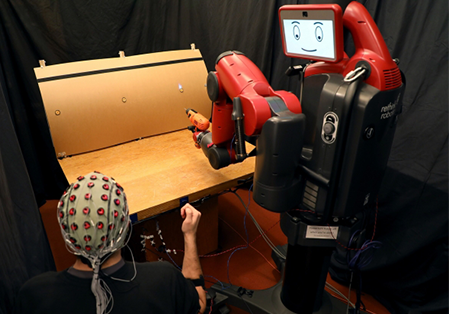
Getting robots to do things isn’t easy: Usually, scientists have to either explicitly program them or get them to understand how humans communicate via language.
But what if we could control robots more intuitively, using just hand gestures and brainwaves?
We present Dense Object Nets, which build on recent developments in self-supervised dense descriptor learning, as a consistent object representation for visual understanding and manipulation.
We demonstrate how a sequence model and a sampling-based planner can influence each other to produce efficient plans and how such a model can automatically learn to take advantage of observations of the environment.
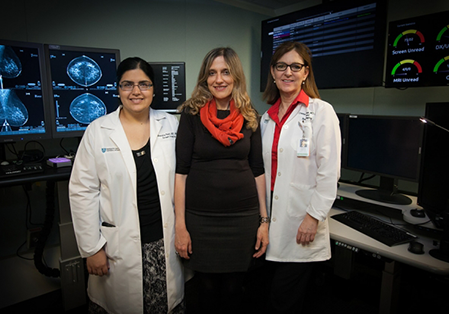
Researchers from MIT and Massachusetts General Hospital have developed an automated model that assesses dense breast tissue in mammograms — which is an independent risk factor for breast cancer — as reliably as expert radiologists.
The RePaint system reproduces paintings by combining two approaches called color-contoning and half-toning, as well as a deep learning model focused on determining how to stack 10 different inks to recreate the specific shades of color.
This work presents the design, fabrication, control, and oceanic testing of a soft robotic fish that can swim in three dimensions to continuously record the aquatic life it is following or engaging.