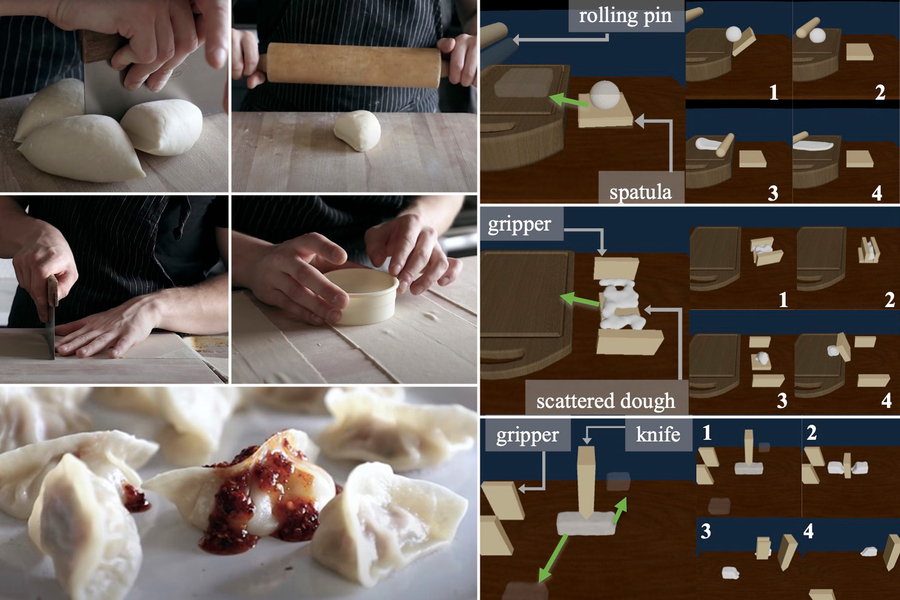
Researchers from MIT and elsewhere have created a framework that could enable a robot to effectively complete complex manipulation tasks with deformable objects, like dough or cloth, that require many tools and take a long time to complete.
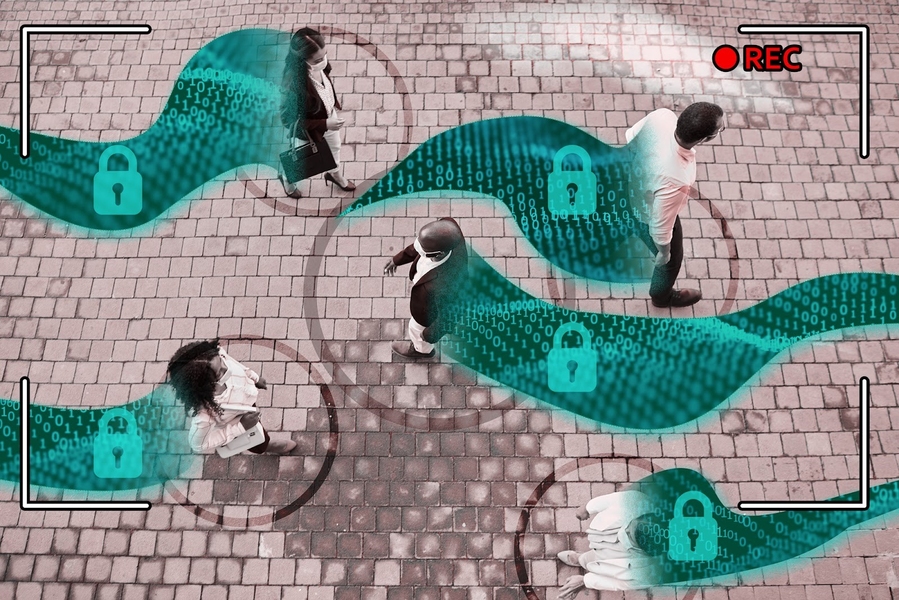
“Privid” could help officials gather secure public health data or enable transportation departments to monitor the density and flow of pedestrians, without learning personal information about people.