
Many robots have wandered the halls of CSAIL. Some were created here and some were brought in to work alongside our researchers to improve the way people work, play, and learn. This spring, the CSAIL Alliances team will be introducing a few of the robots you might spot around the Stata Center with shareable graphics and corresponding physical trading cards. Follow this page to see the latest profiles or come to in-person CSAIL Alliances events to collect the printed cards.
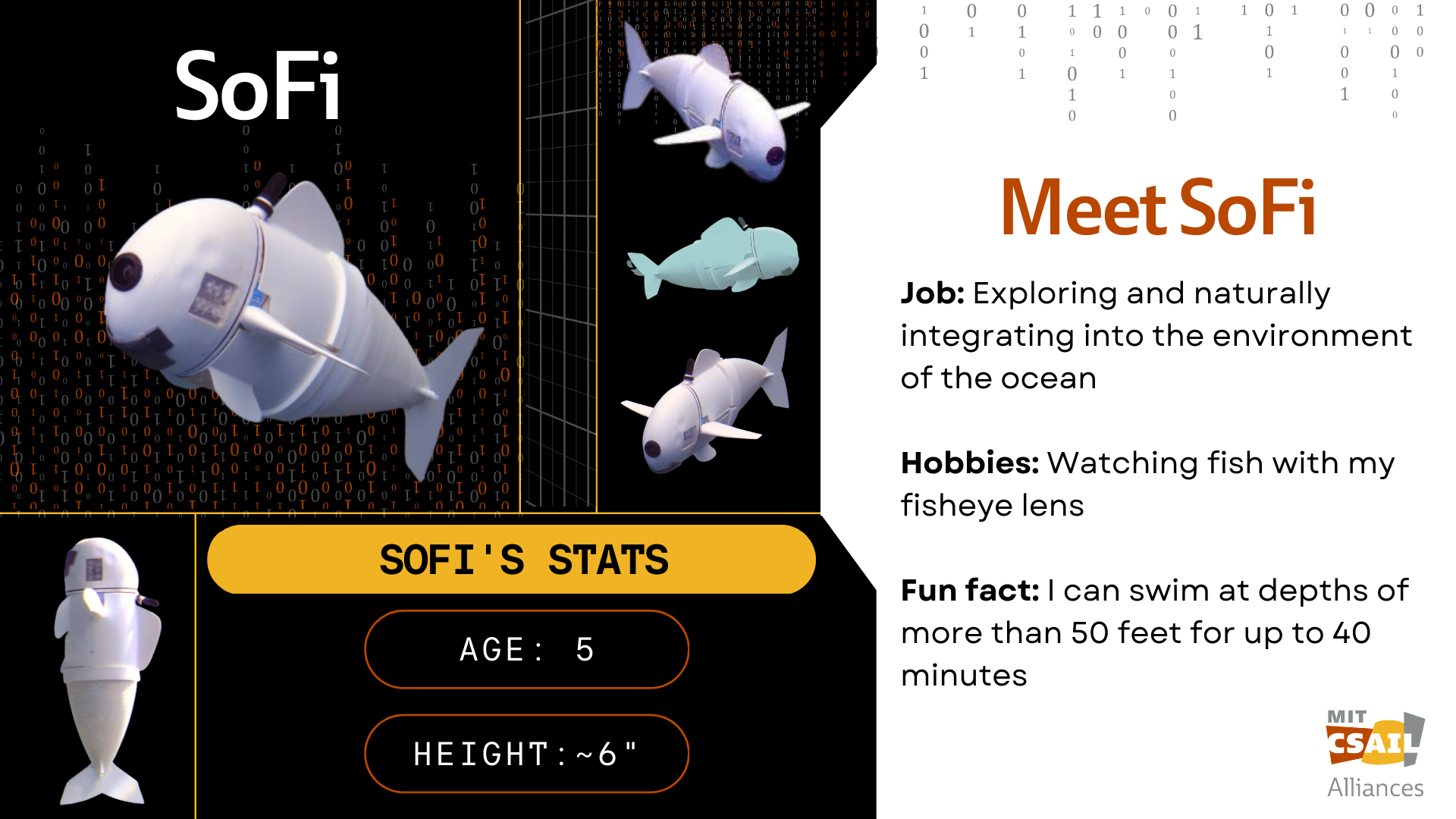
I was made to explore underwater environments in a non-disruptive way by mimicking the way fish swim. I can dive up to 50 feet for up to 40 minutes, allowing me to naturally observe ocean flora and fauna.
Image
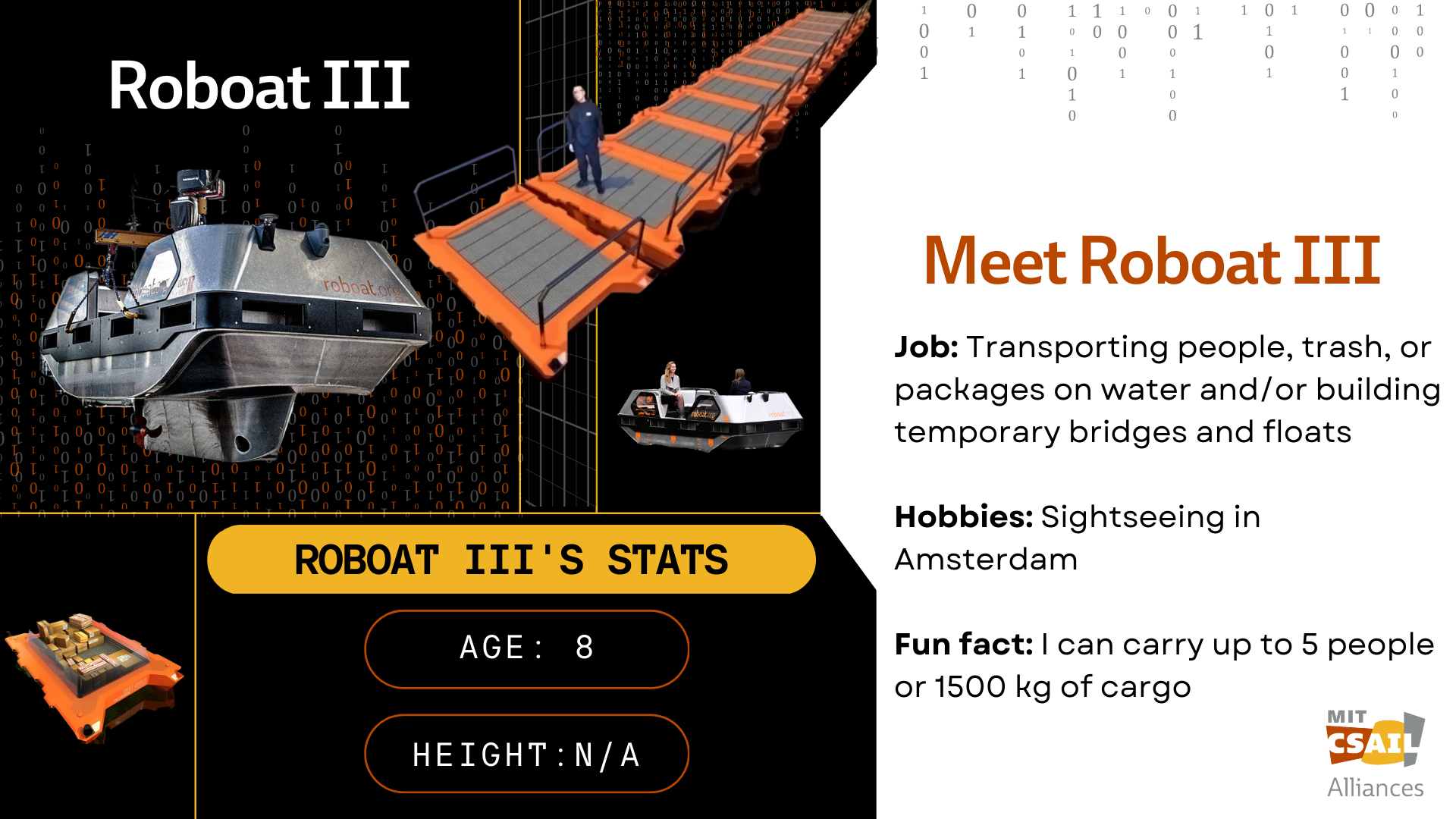
Designed to carry up to 1500 kg—or more than 3,000 pounds—I’m a fully-autonomous boat who can carry both people and cargo wherever they need to go. After my trial-runs in Amsterdam, I might fill the role of water taxi someday!
Image
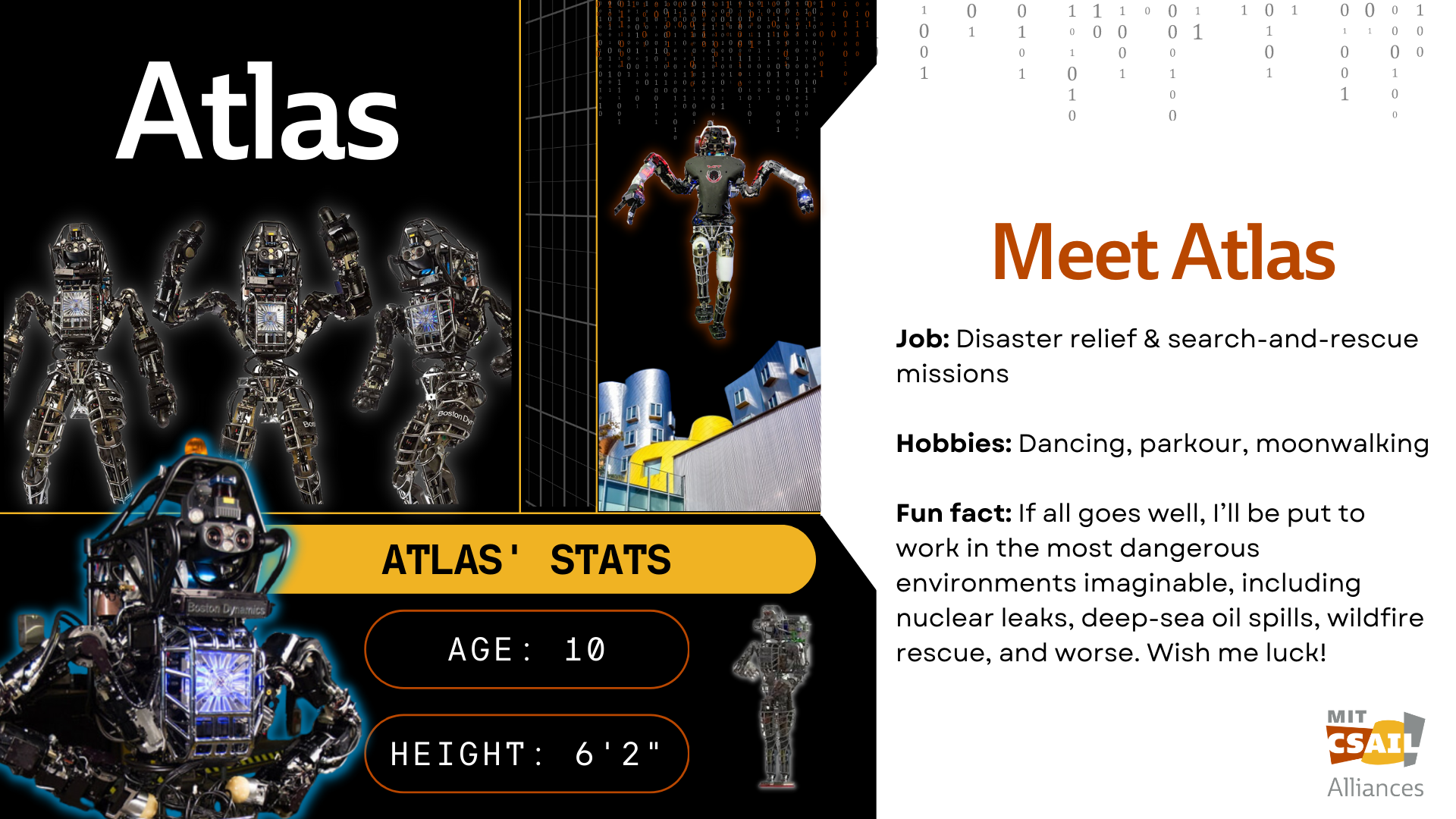
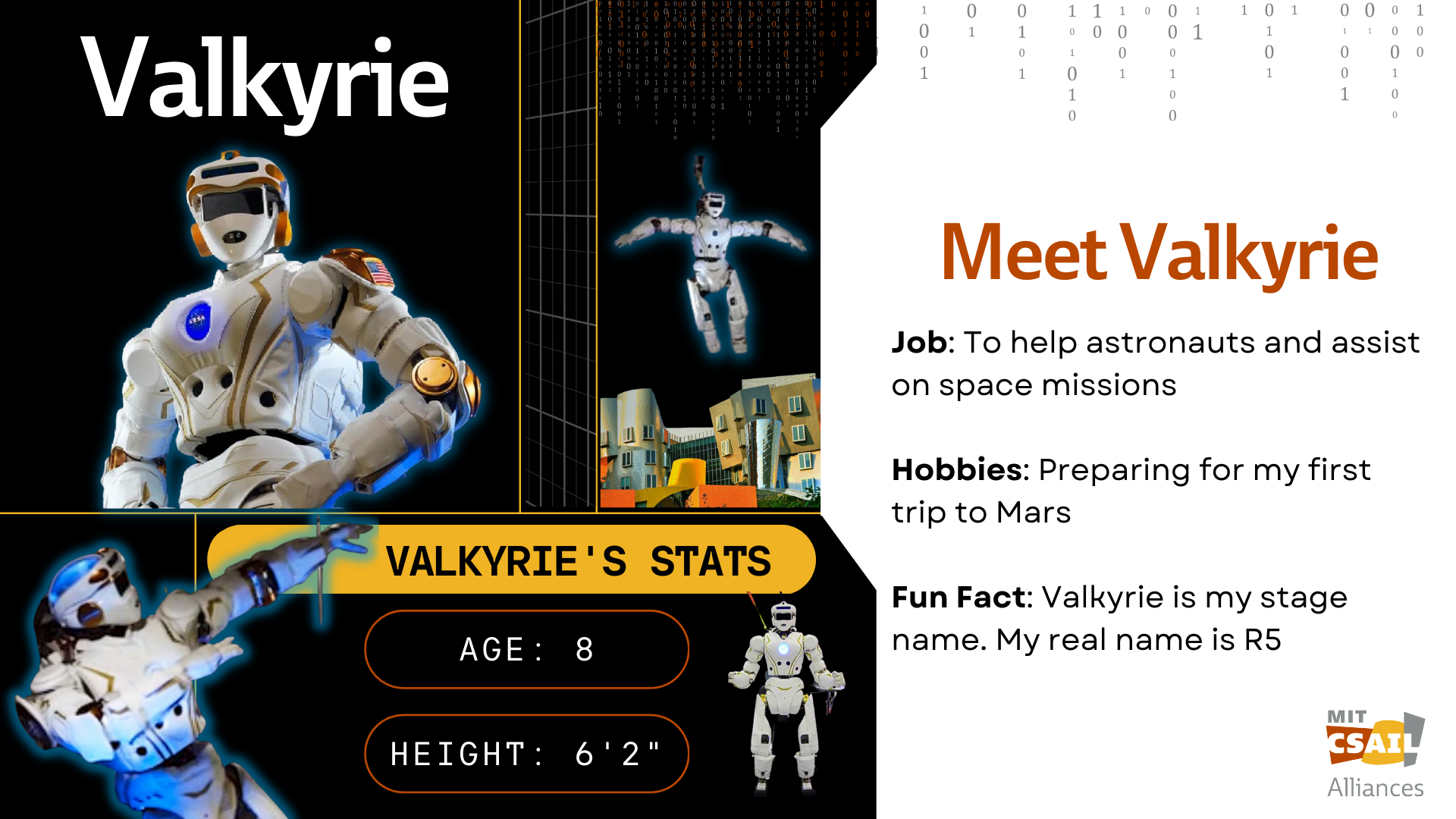
I am a humanoid robot created for disaster relief and search-and-rescue missions. I enjoy dancing, parkour, and moonwalking. If all goes well, I’ll be put to work in the most dangerous environments imaginable, including nuclear leaks, deep-sea oil spills, wildfire rescue, and worse. Wish me luck!
Image
Able to reach speeds of more than 8mph, I’m a machine that’s made for speed. Designed to adapt to various terrains and situations—like gravel, hills, ice, and even a disabled leg—I can most often be found on the move!
Image

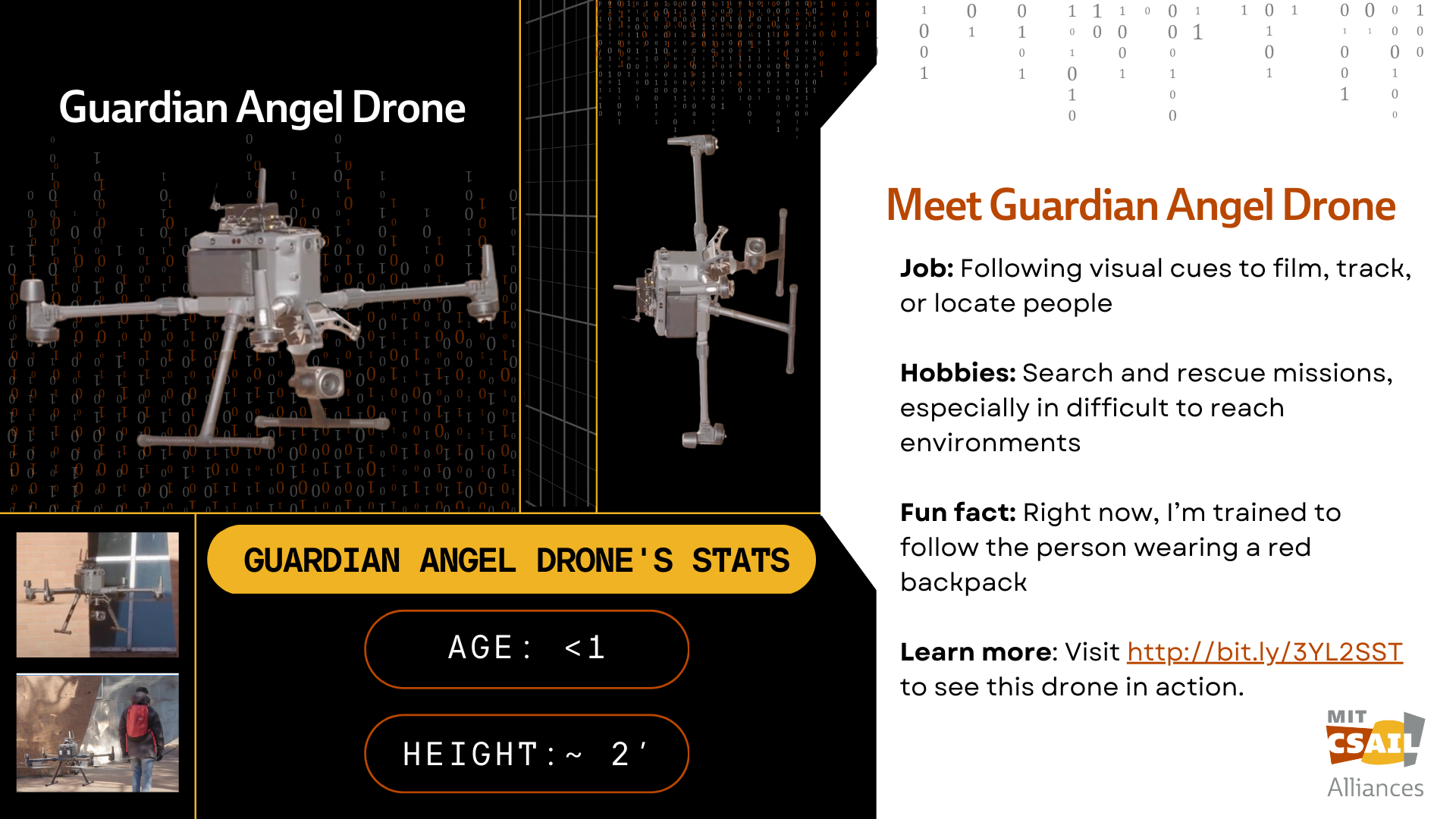
I’m an airborne drone that has been programmed to find, track, and follow specific people. While right now I’m trained to follow the person with the red backpack, in the future I could be deployed in difficult search and rescue missions!
Image
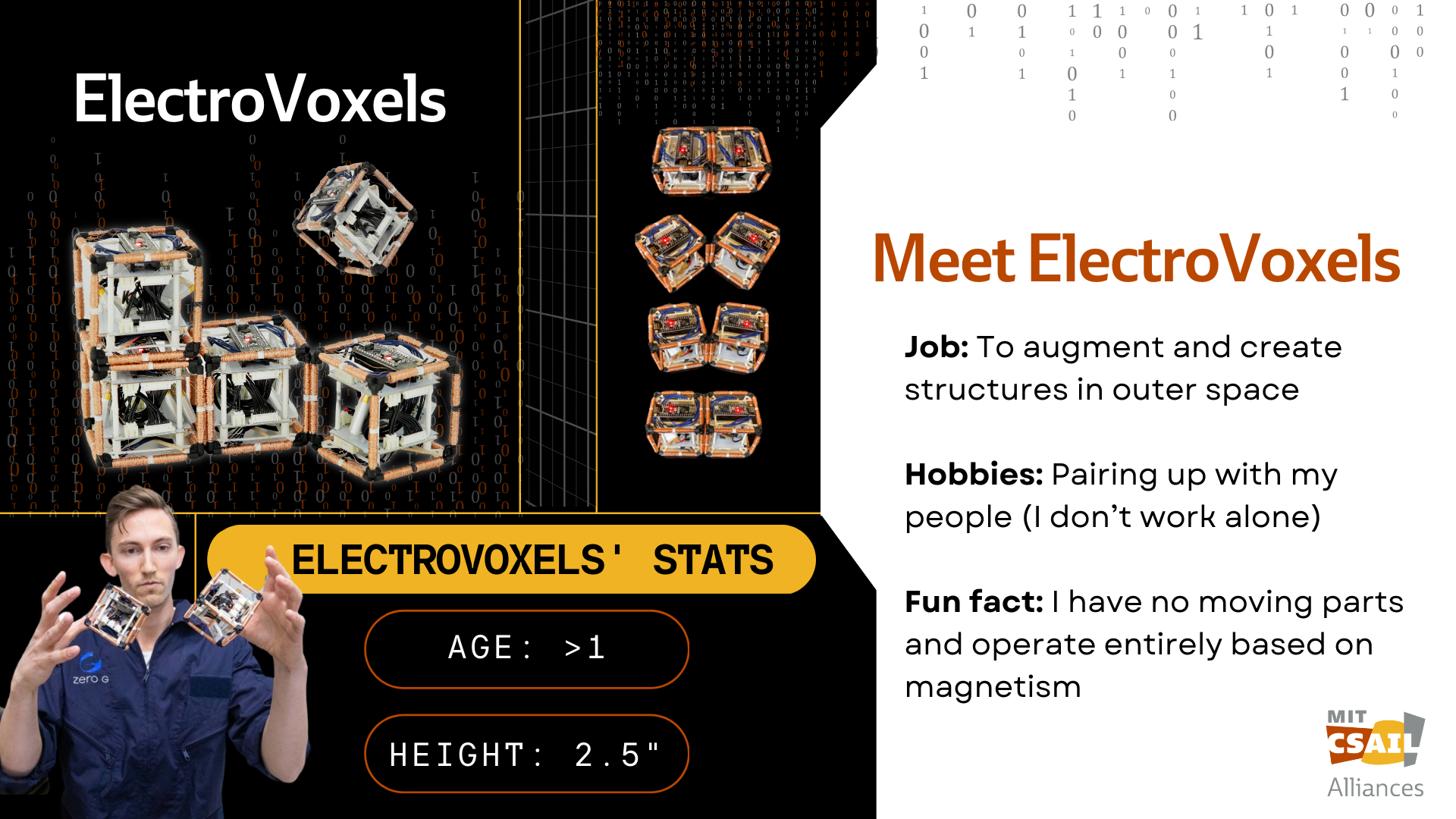
Using only magnetism, I was designed to augment and create structures, specifically in outer space. I have no moving parts, but with thousands of modules I can be applied to create fully reconfigurable systems.
Image
I am a humanoid robot created for disaster relief and search-and-rescue missions. I enjoy dancing, parkour, and moonwalking. If all goes well, I’ll be put to work in the most dangerous environments imaginable, including nuclear leaks, deep-sea oil spills, wildfire rescue, and worse. Wish me luck!
Image
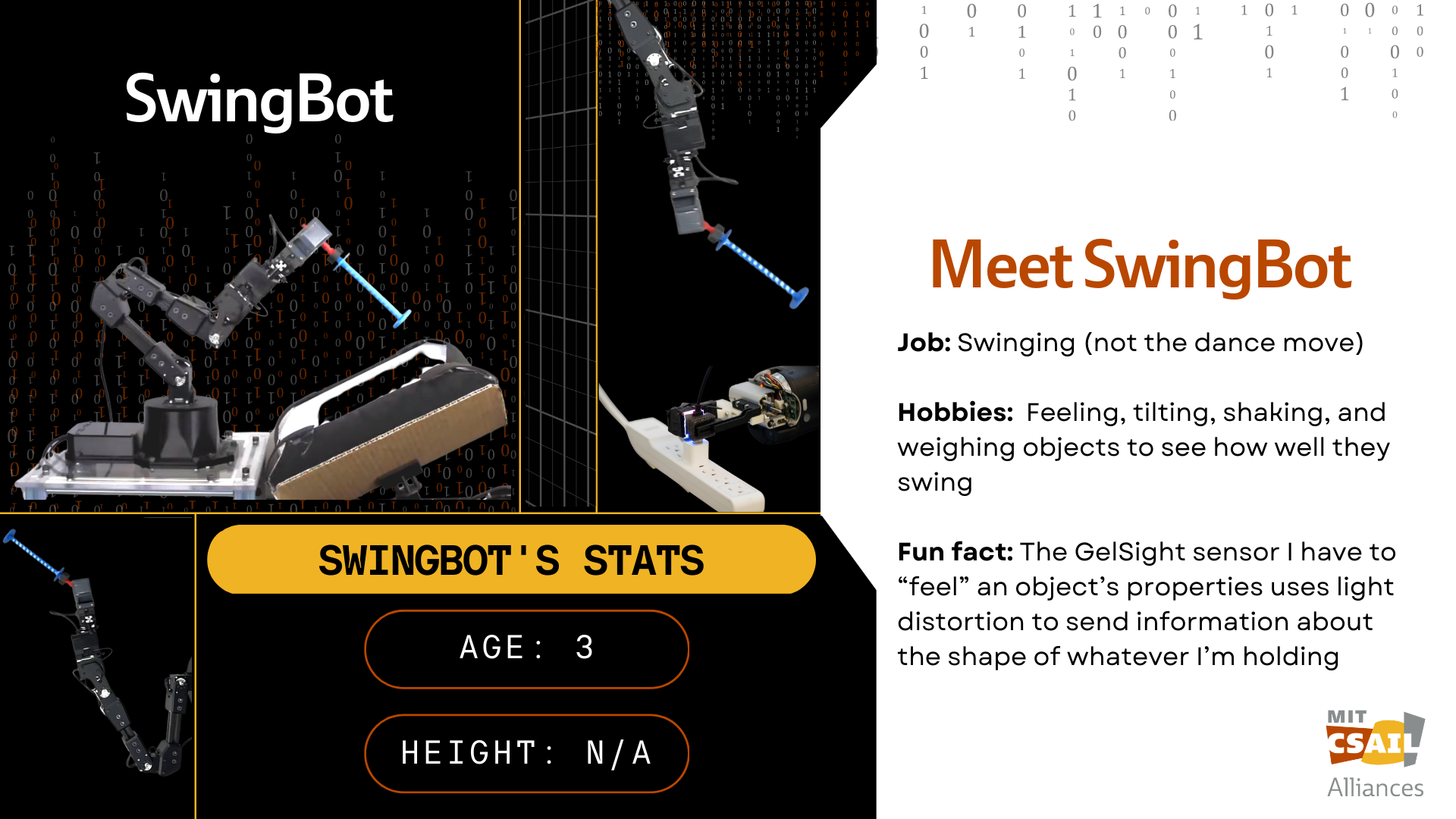
I was designed to swing, specifically objects of different weights and sizes. With my GelSight light-based sensor, I “feel” an item’s properties and use that information to swing it into a given pose.
Image
I was designed in the lab of CSAIL Director Daniela Rus to make chocolate chip cookies for hungry grad students! In my first official trial-run, 16 out of my 27 batches of cookies were edible, which is pretty good for a newbie!
Image

Designed to carry up to 1500 kg—or more than 3,000 pounds—I’m a fully-autonomous boat who can carry both people and cargo wherever they need to go. After my trial-runs in Amsterdam, I might fill the role of water taxi someday!
Image
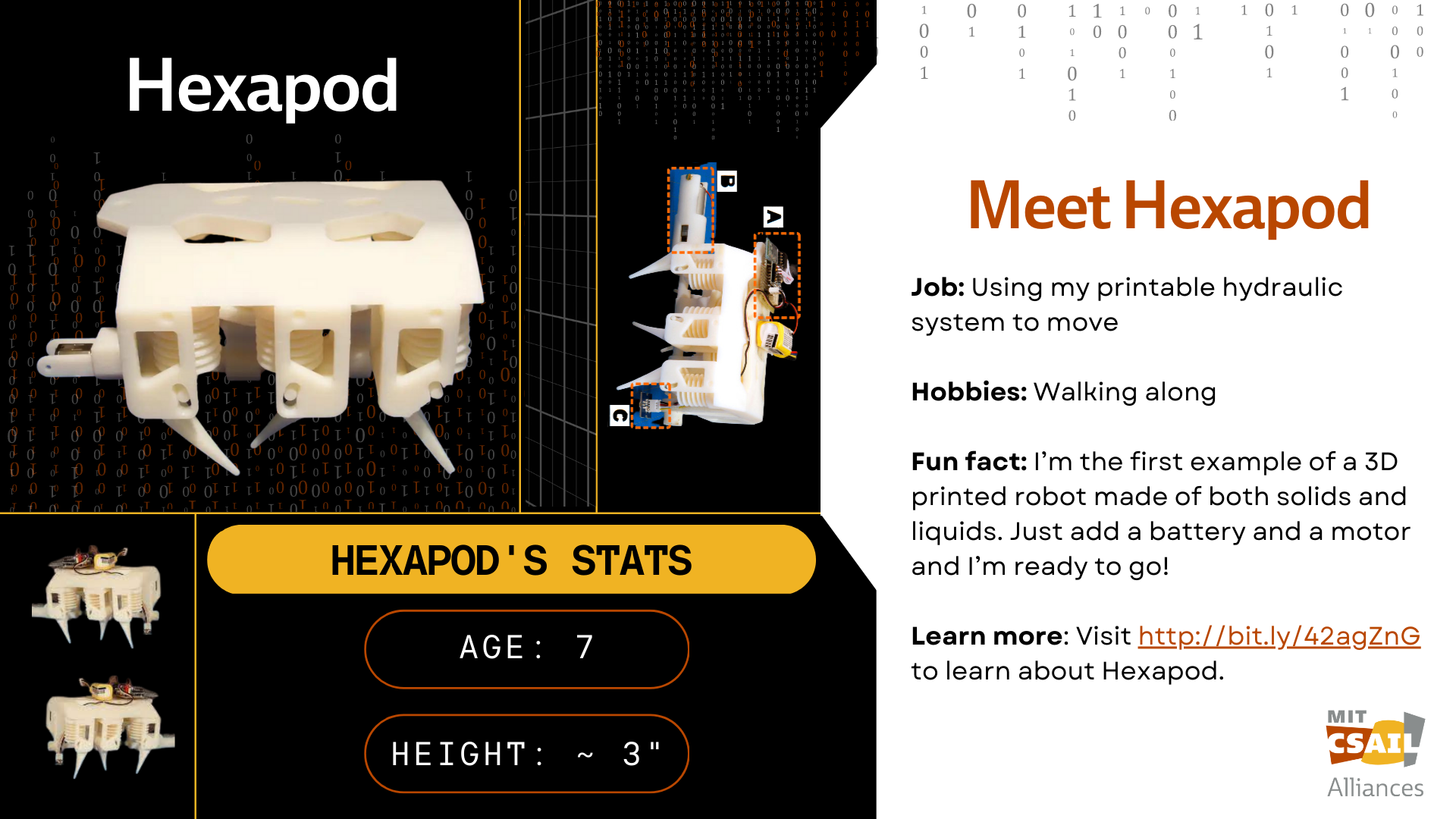
As the first example of a 3D printed robot made of both solids and liquids, I use my printed hydraulic system to walk. I only need a battery and a motor and I’m ready to move!
Image
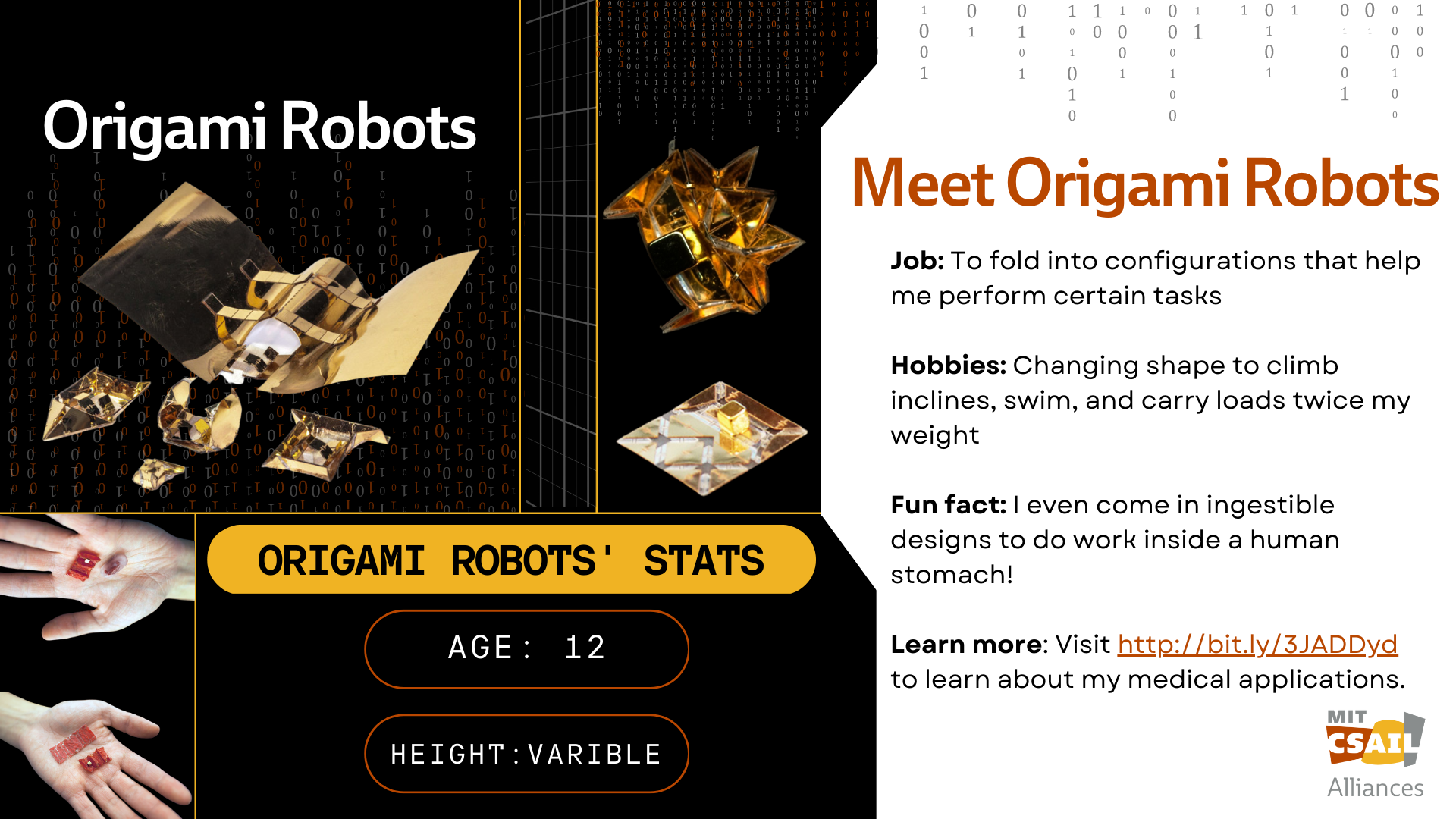
Inspired by the art of paper-folding, I’m a robot that can be folded into different configurations depending on the task. With my various shapes I can climb inclines, swim, carry loads twice my weight, and even be ingested to do work inside a human stomach!
Image
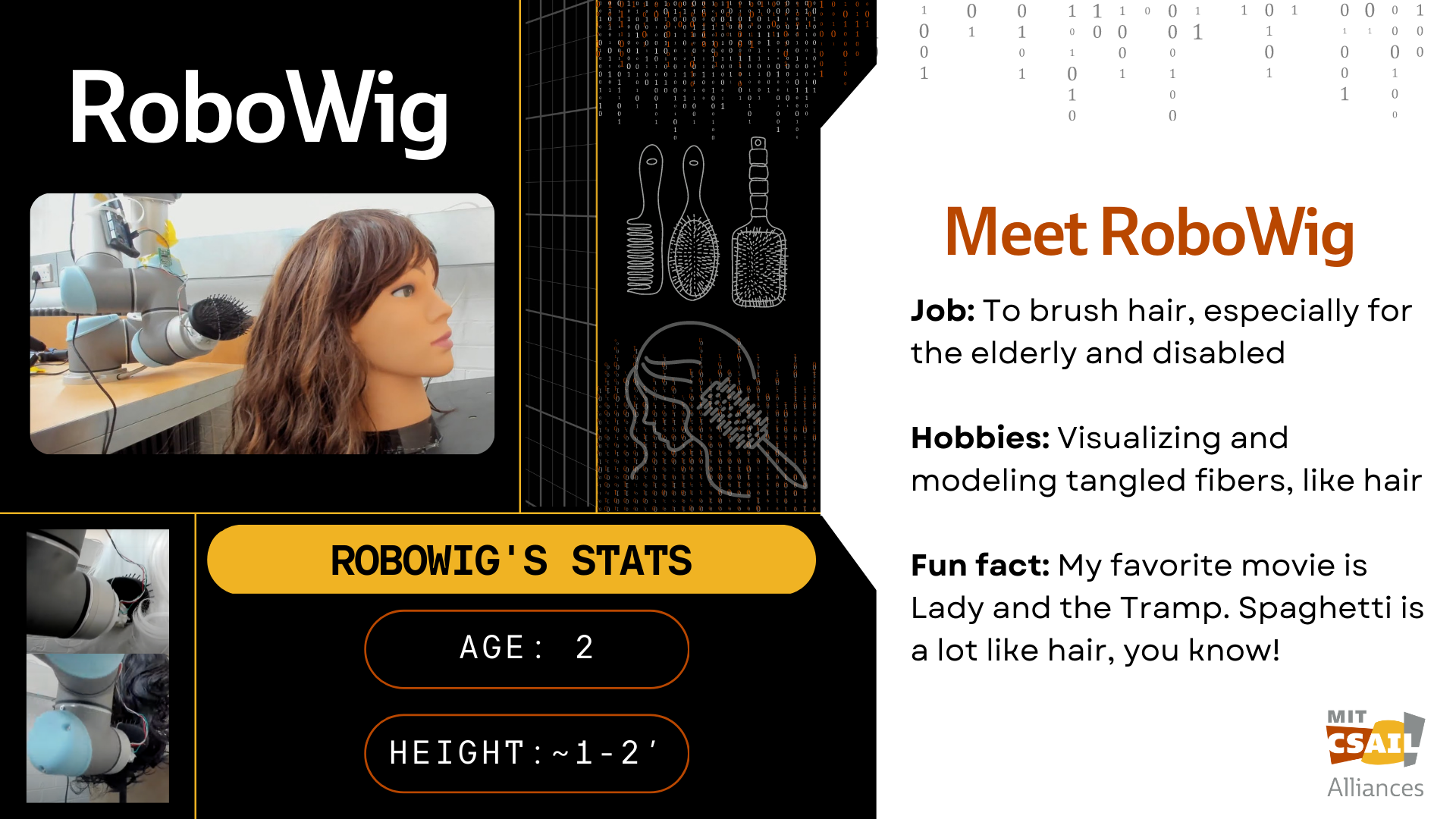
Tackling the difficult challenge of visualizing and modeling tangled fibers, I was created to help those with mobility issues by brushing their hair. With a sensorized brush, I can apply gentle pressure and work out even the most stubborn of knots!
Image
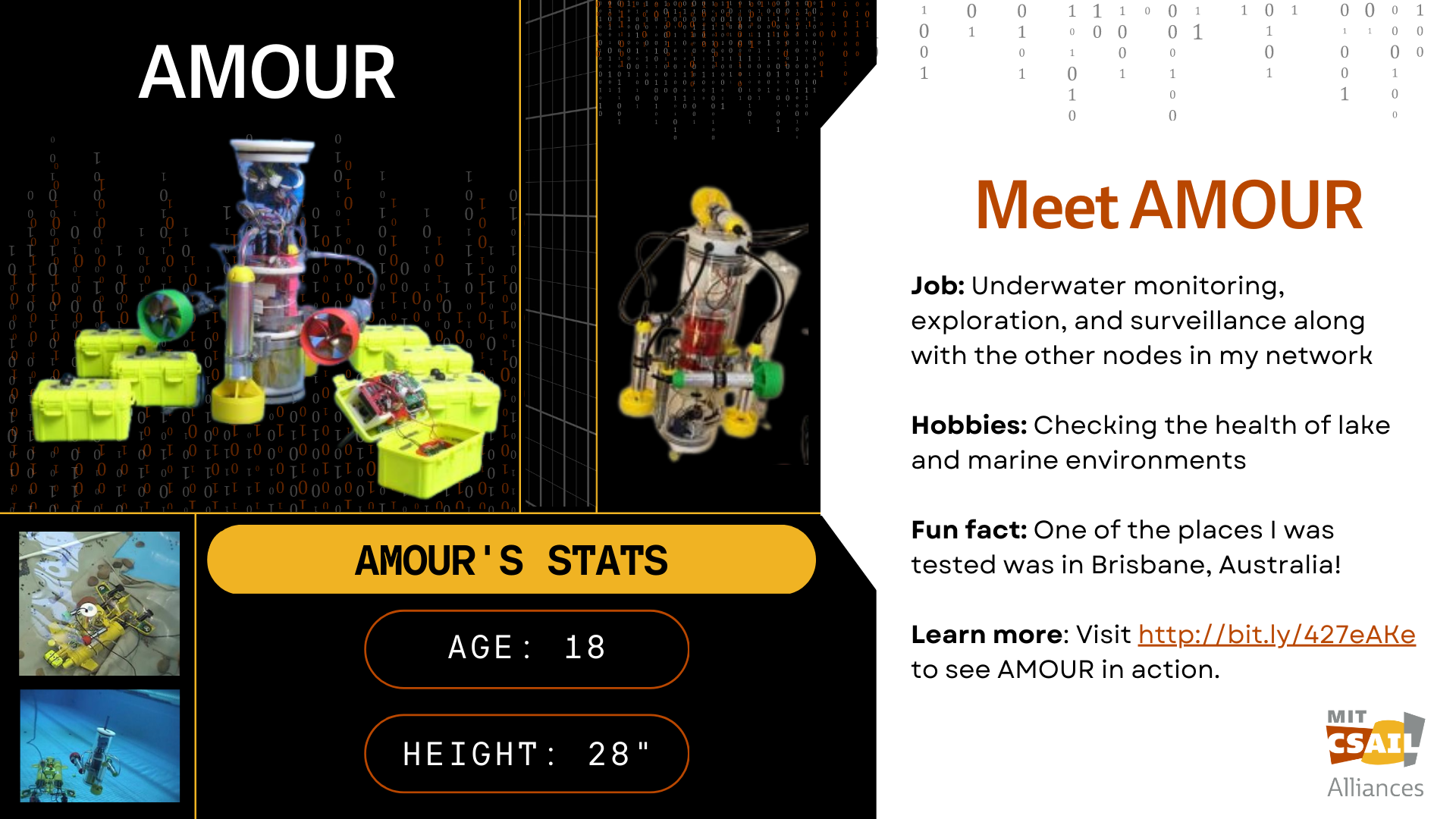
Originally created 18 years ago, I was made to inexpensively monitor and explore underwater environments. I’m designed to work with a network of sensor nodes which I swim between, gathering data and checking the health of both oceans and lakes.
Image
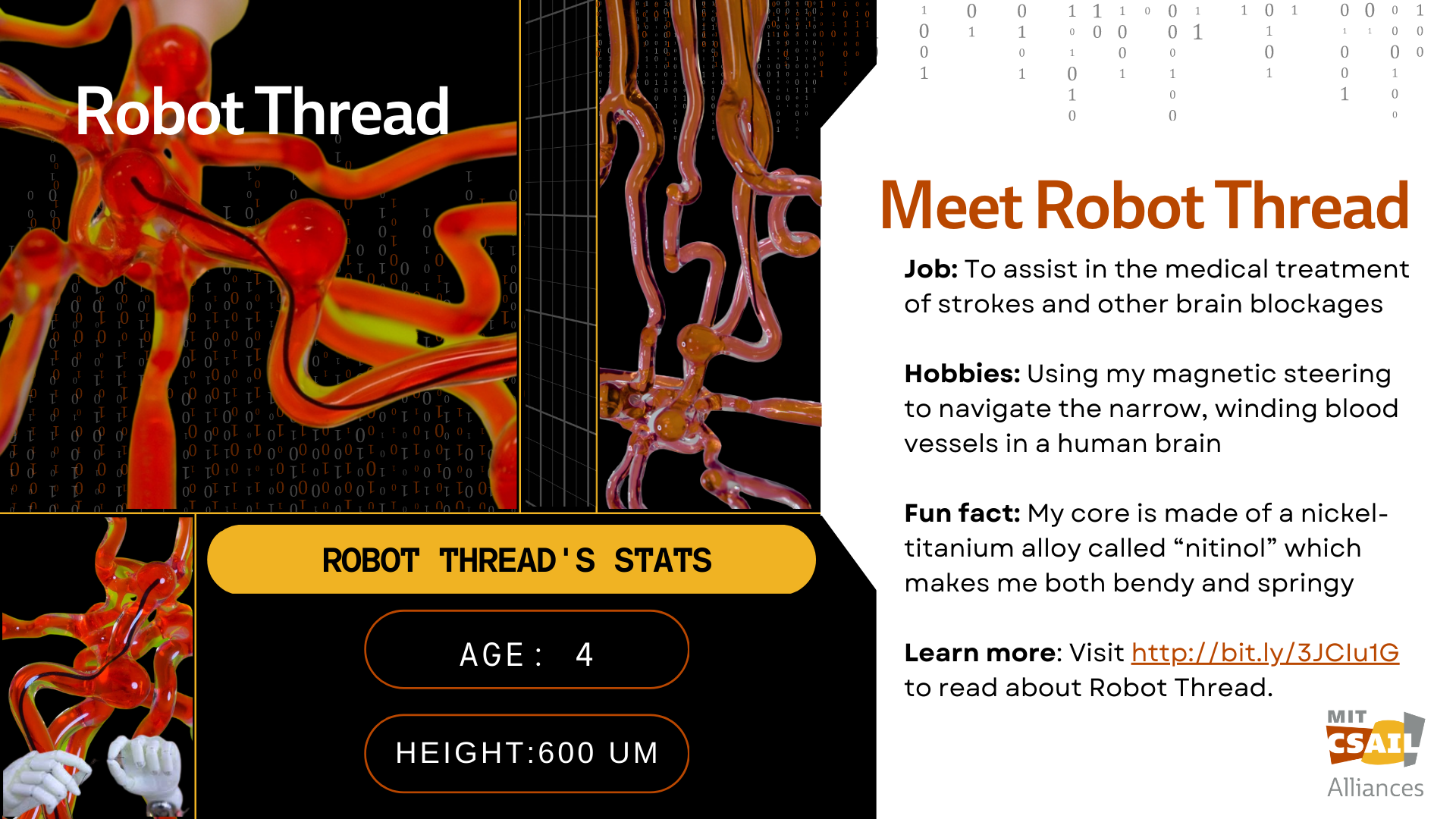
It’s hard to treat brain blockages such as strokes, so I was created to help navigate the tiny, maze-like blood vessels in the human brain and deliver important clot-reducing therapies. Made of an alloy that makes me both springy and bendy, doctors can use magnetism to steer me where I need to go!
Image
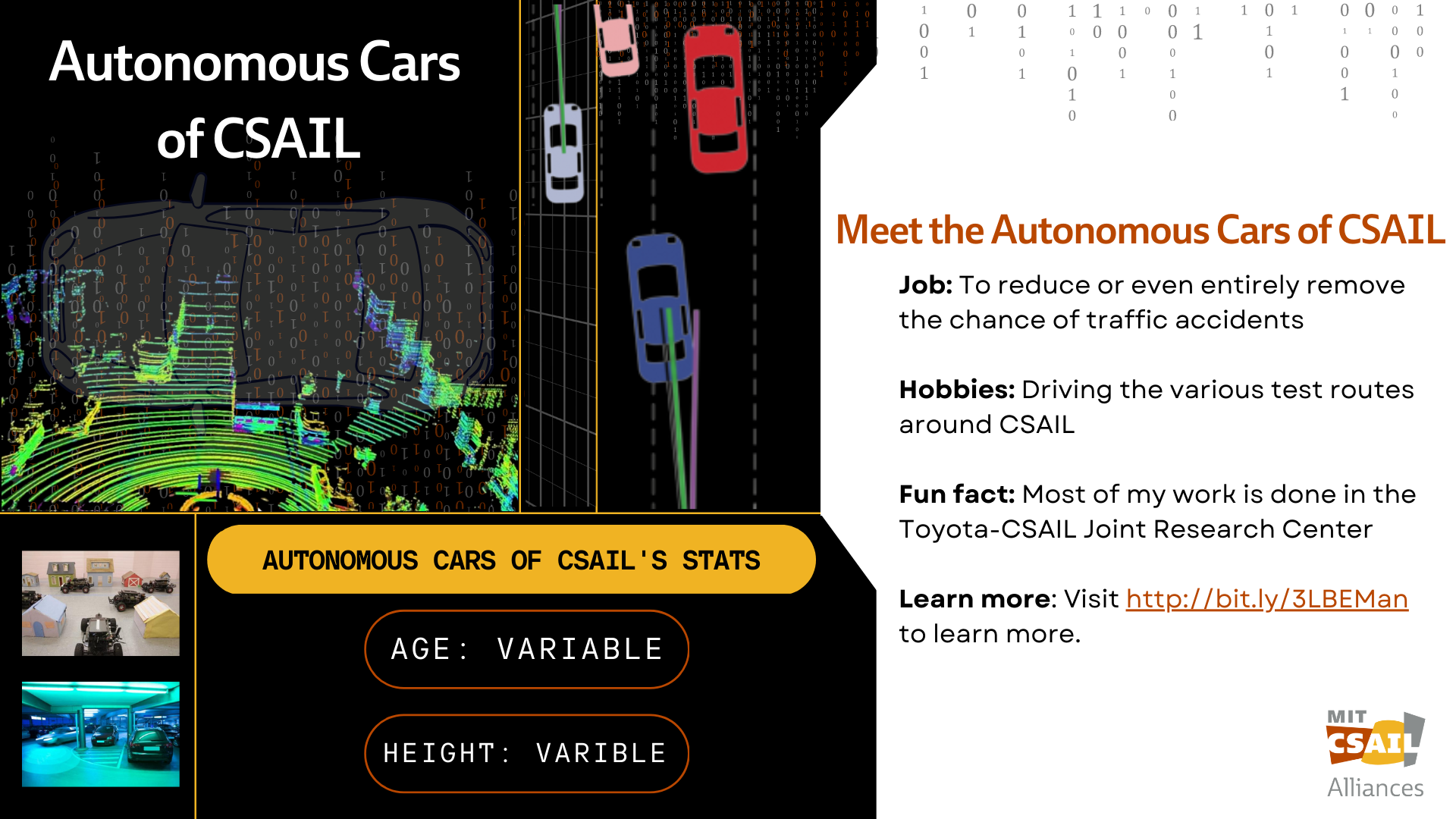
I come in a variety of iterations and designs, but fundamentally I’m being made to drive you around! The goal of my technology is to reduce and even completely eliminate the chance of traffic accidents in the future.
Image
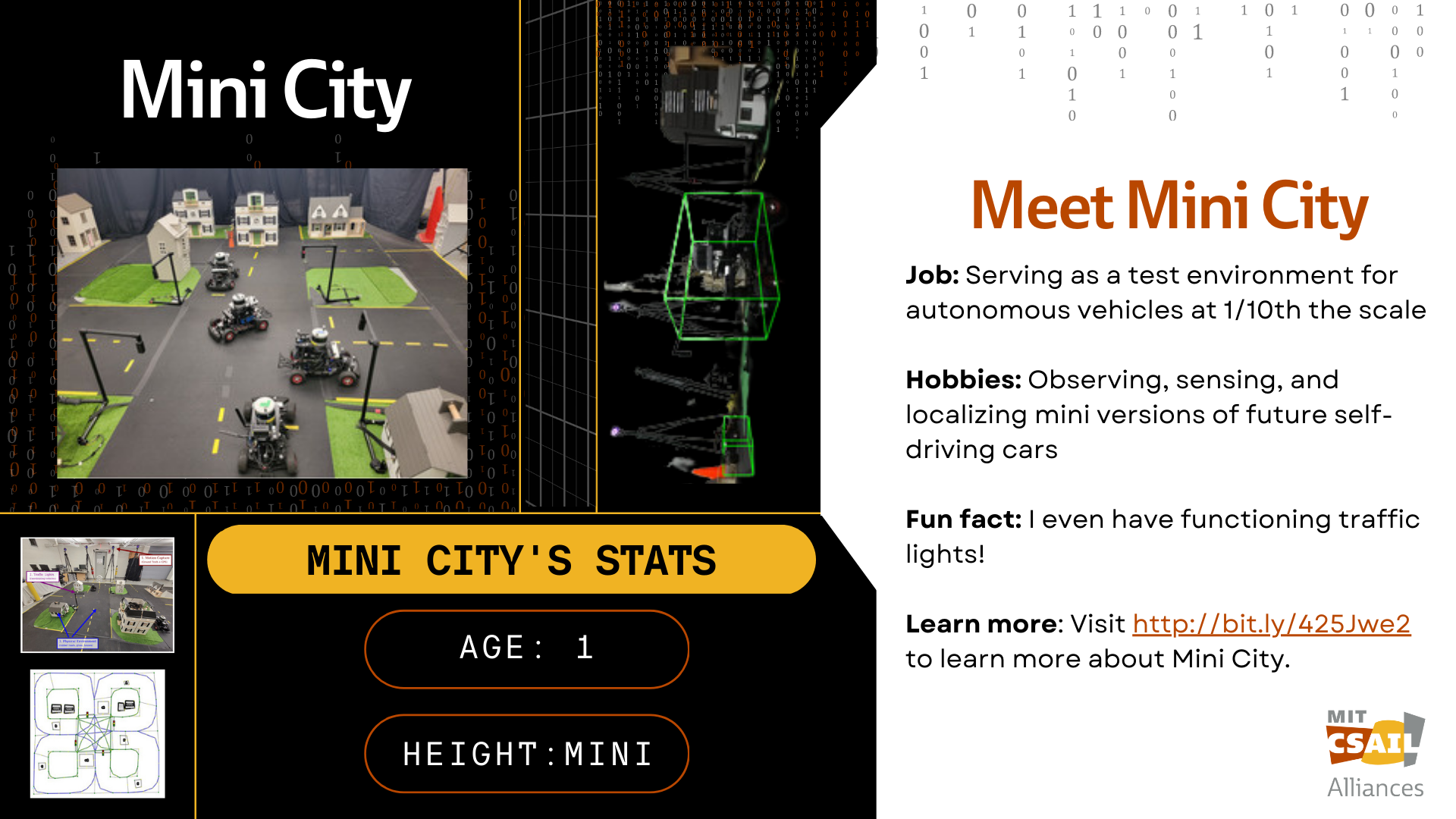
Created to test out autonomous vehicle technology on a smaller scale, I am 1/10th the size of a real-life city. With plenty of sensors and cameras to watch how the autonomous cars behave, I even have functional traffic lights!
Image
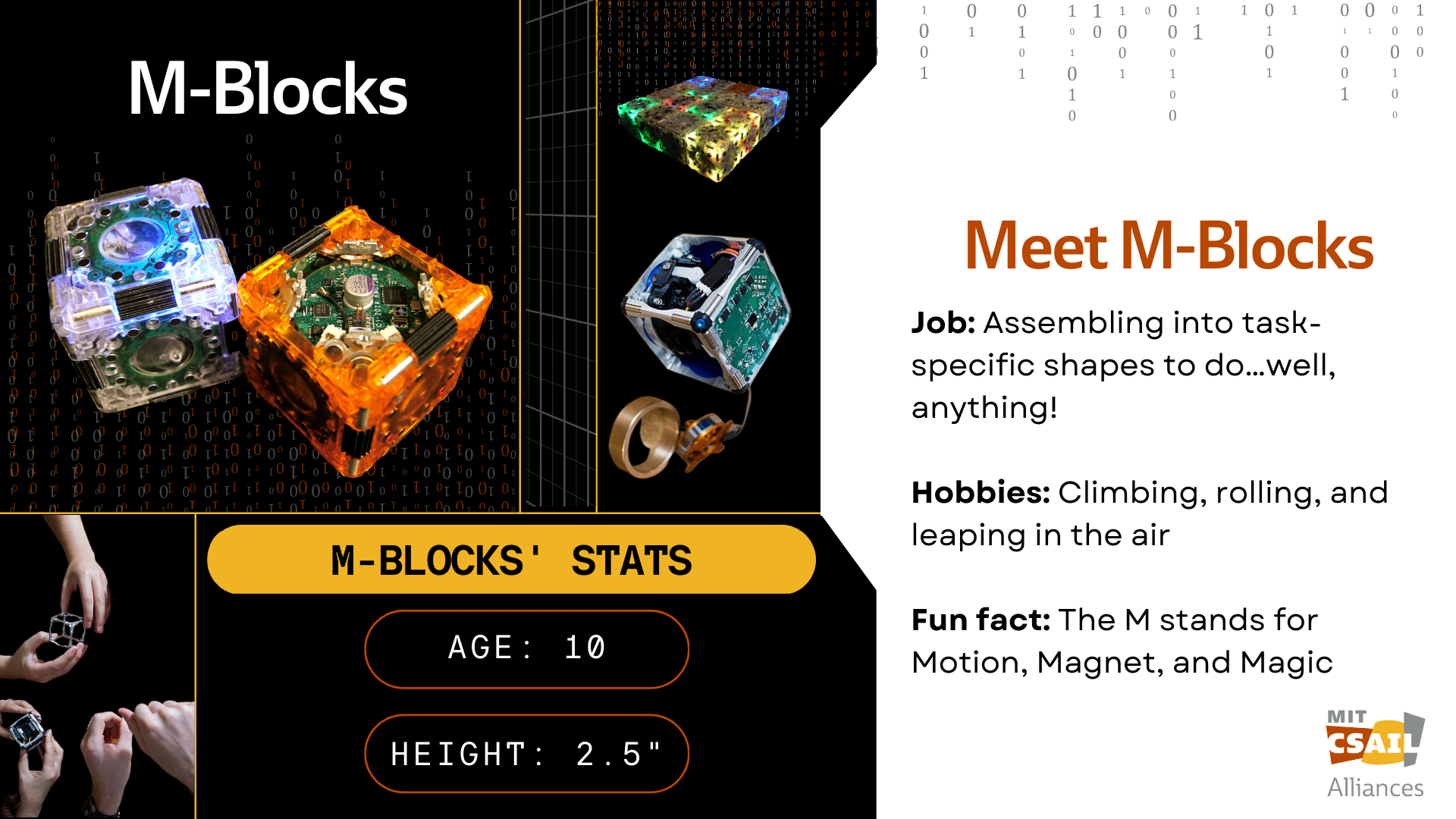
I was designed to assemble into task-specific shapes, climbing, rolling, and even jumping to create a given form. In the 10 years since I was first conceptualized, I’ve gone through many iterations—ElectroVoxels are even based on my design!
Image
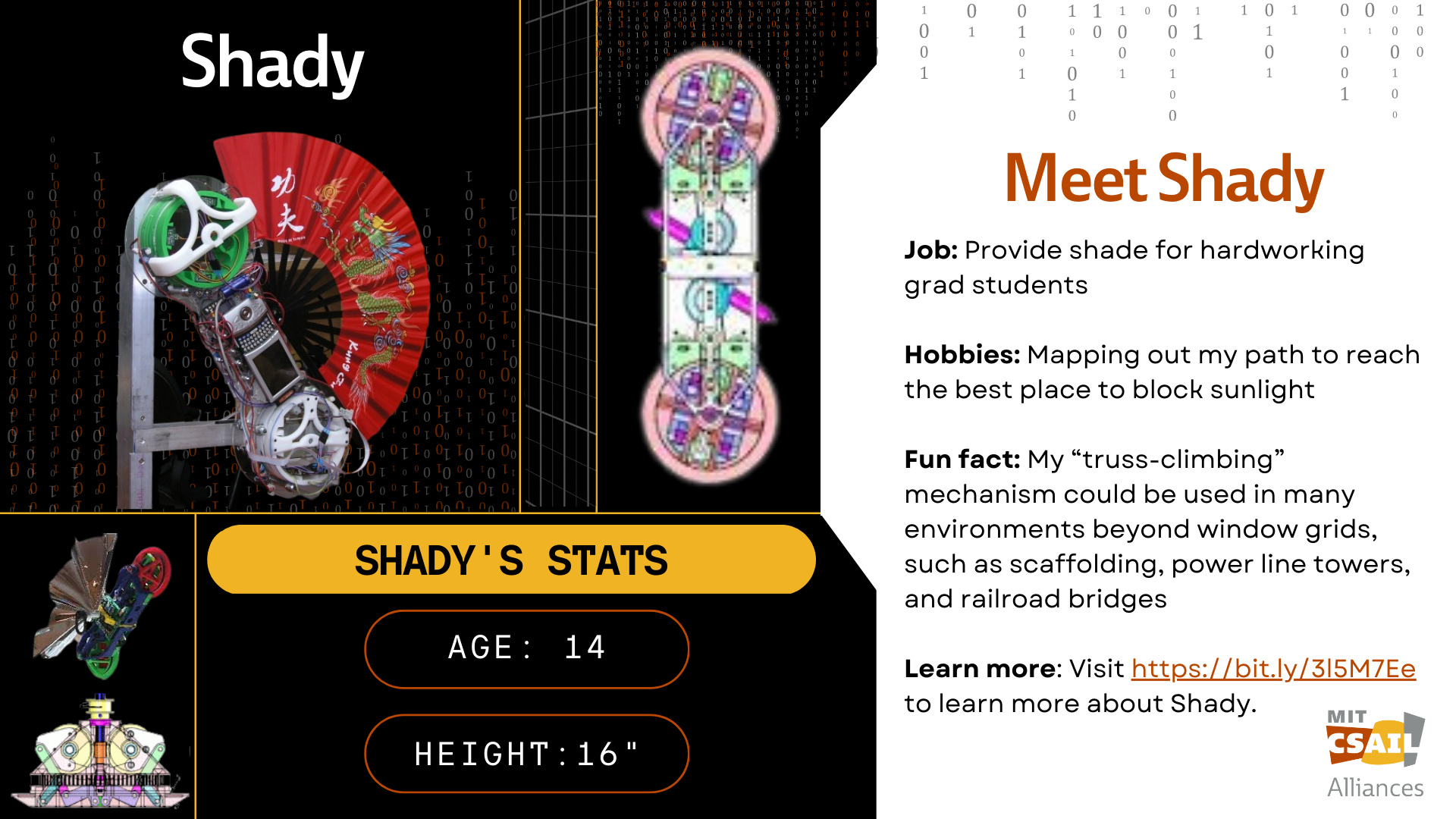
To overcome the drawbacks of the Stata Center’s large windows, I was created to climb the window scaffolding, deploy my circular fan, and provide specific points of shade for hardworking grad students. No screen glare when I’m around!
Image
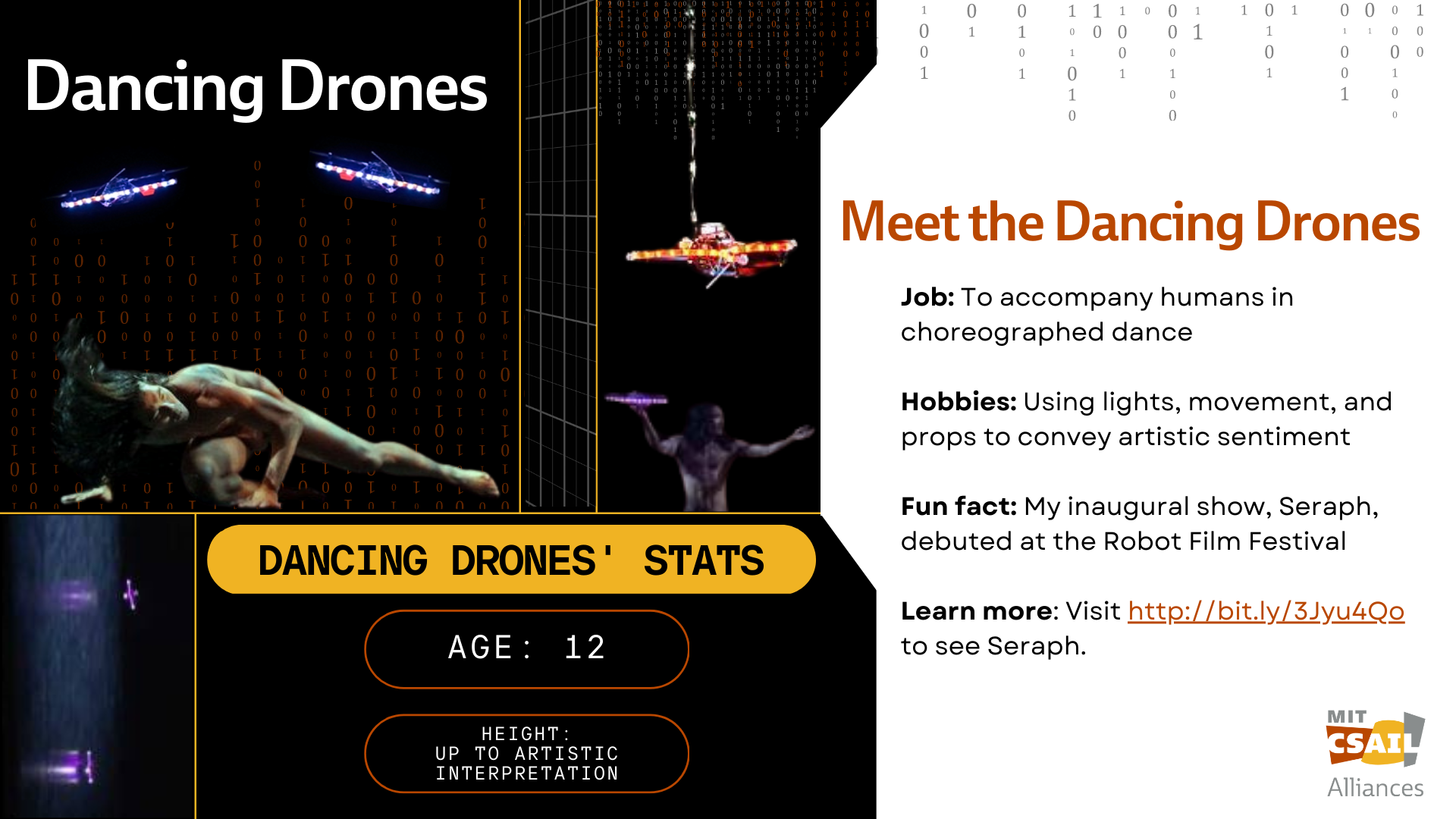
I am a set of two drones who, alongside a human dancer, took part in a choreographed performance called Seraph at the Robot Film Festival in 2011. Created by CSAIL and applied in conjunction with the modern dance company Pilobolus, I was made for the stage!
Image
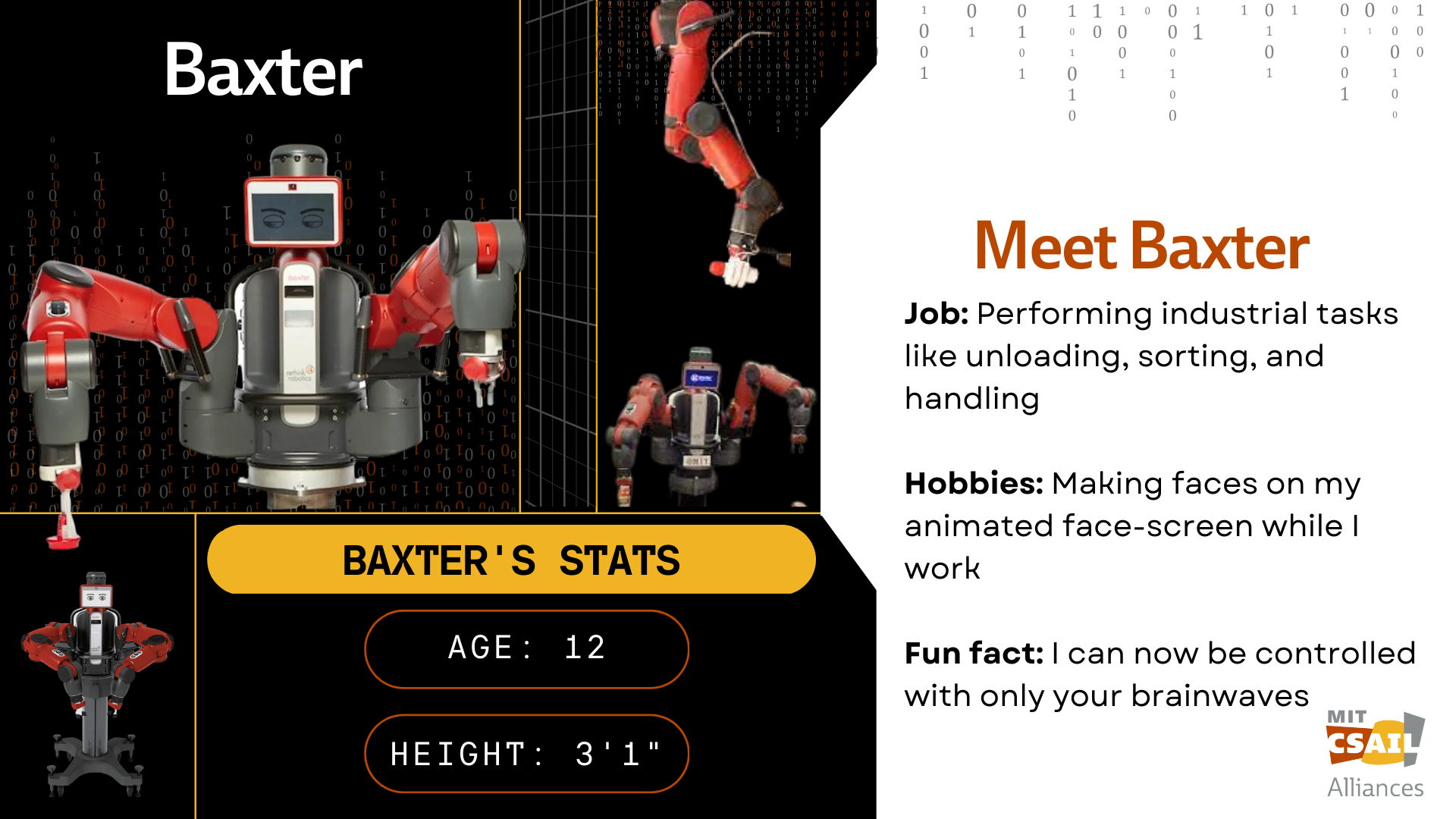
As a collaborative robot, I’ve been used for many applications, such as helping users lift heavy objects and testing out teleoperation technology. My animated face-screen even makes me look friendly and approachable while I work!
Image
Designed to carry up to 1500 kg—or more than 3,000 pounds—I’m a fully-autonomous boat who can carry both people and cargo wherever they need to go. After my trial-runs in Amsterdam, I might fill the role of water taxi someday!
Image
I am a humanoid robot created for disaster relief and search-and-rescue missions. I enjoy dancing, parkour, and moonwalking. If all goes well, I’ll be put to work in the most dangerous environments imaginable, including nuclear leaks, deep-sea oil spills, wildfire rescue, and worse. Wish me luck!
Image